

- 272.83 KB
- 3页
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
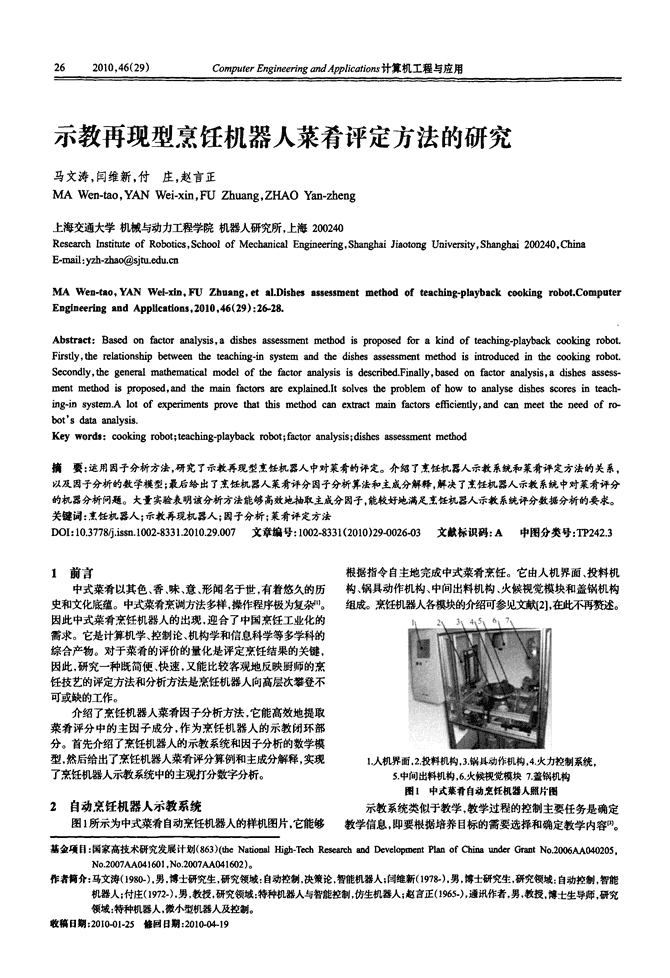
'262010,46(29)ComputerEngineeringandApplications计算机工程与应用示教再现型烹饪机器人菜肴评定方法的研究马文涛,闰维新,付庄,赵言正MAWen—tao,YANWei·xin,FUZhuang,ZHAOYan—zheng上海交通大学机械与动力工程学院机器人研究所,上海200240ResearchInstituteofRobotics,SchoolofMechanicalEngineering,ShanghaiJiaotongUniversity,Shanghai200240,ChinaE-mail:yzh—zhao@sjtu.edu.cnMAWen-tao,YANWei-xtn,FUZhuang,eta1.Dishesassessmentmethodofteaching-playbackcookingrobot.ComputerEngineeringandAppflcafions,2010,46(29):26-28.Abstract:Basedonfactoranalysis,adishesassessmentmethodisproposedforakindofteaching-playbackcookingrobot.Firstly,therelationshipbetweentheteaching-insystemandthedishesassessmentmethodisin廿joducedinthecookingrobot.Secondly,thegeneralmathematicalmodelofthefactoranalysisisdescribed.Finally,based011factoranalysis,adishesassess—mentmethodisproposed,andthemainfactorsareexplained.Itsolvestheproblemofhowtoanalysedishesscoresinteach-ing-insystem.Alotofexperimentsprovethatthismethodcallextractmainfactorsefficiently,andCallmeettheneedoftO-hot’Sdataanalysis.Keywords:cookingrobot;teaching-playbackrobot;factoranalysis;dishesassessmentmethod摘要:运用因子分析方法,研究了示教再现型烹饪机器人中对菜肴的评定。介绍了烹饪机器人示教系统和菜肴评定方法的关系,以及因子分析的数学模型;最后给出了烹饪机器人菜肴评分因子分析算法和主成分解释,解决了烹饪机器人示教系统中对菜肴评分的机器分析问题。大量实验表明该分析方法能够高效地抽取主成分因子。能较好地满足烹饪机器人示教系统评分数据分析的要求。关键词:烹饪机器人;示教再现机器人;因子分析;菜肴评定方法DOI:10.3778,j.issn.1002.8331.2010.29.007文章编号:1002-8331(2010)29-0026·03文献标识码:A中图分类号":TP242-3l前言中式菜肴以其色、香、味、意、形闻名于世,有着悠久的历史和文化底蕴。中式菜肴烹调方法多样,操作程序极为复梨”。因此中式菜肴烹饪机器人的出现,迎合了中国烹饪工业化的需求。它是计算机学、控制论、机构学和信息科学等多学科的综合产物。对于菜肴的评价的量化是评定烹饪结果的关键,因此,研究一种既简便、快速。又能比较客观地反映厨师的烹饪技艺的评定方法和分析方法是烹饪机器入向高层次攀登不可或缺的工作。介绍了烹饪机器人菜肴因子分析方法,它能高效地提取菜肴评分中的主因子成分,作为烹饪机器人的示教闭环部分。首先介绍了烹饪机器人的示教系统和因子分析的数学模型,然后给出了烹饪机器人菜肴评分算例和主成分解释,实现了烹饪机器人示教系统中的主观打分数字分析。2自动烹饪机器人示教系统图l所示为中式菜肴自动烹饪机器人的样机图片,它能够根据指令自主地完成中式菜肴烹饪。它由人机界面、投料机构、锅具动作机构、中间出料机构、火候视觉模块和盖锅机构组成。烹饪机器人各模块的介绍可参见文献【2】,在此不再赘述。1.人机界面,2.投料机构,3.锅具动作机构,4.火力控制系统,5.中间出料机构,6.火候视觉模块7.盖锅机构图1中式菜肴自动烹饪机器人照片图示教系统类似于教学,教学过程的控制主要任务是确定教学信息,即要根据培养目标的需要选择和确定教学内容m。基金项日:国家高技术研究发展计划(863)(theNationalHigh-TechRe.archandDevelopmentPlanofChinaunderG-raatNo.2006AA040205.No.2007AA041601。No.2007AA041602)。作者倚介:马文涛(1980.),男,博士研究生,研究领域:自动控制,决策论.智能机器人;闰维新(1978·)。男,博士研究生,研究领域:自动控制,智能机器人;付庄(1972.),男,教授。研究领域:特种机器人与智能控制,仿生机器人;赵言正(1965-),通讯作者,男,教授。博士生导师,研究领域:特种机器人,微小型机器人及控制。收稿日期:2010-01-25修回日期:2010.04-19
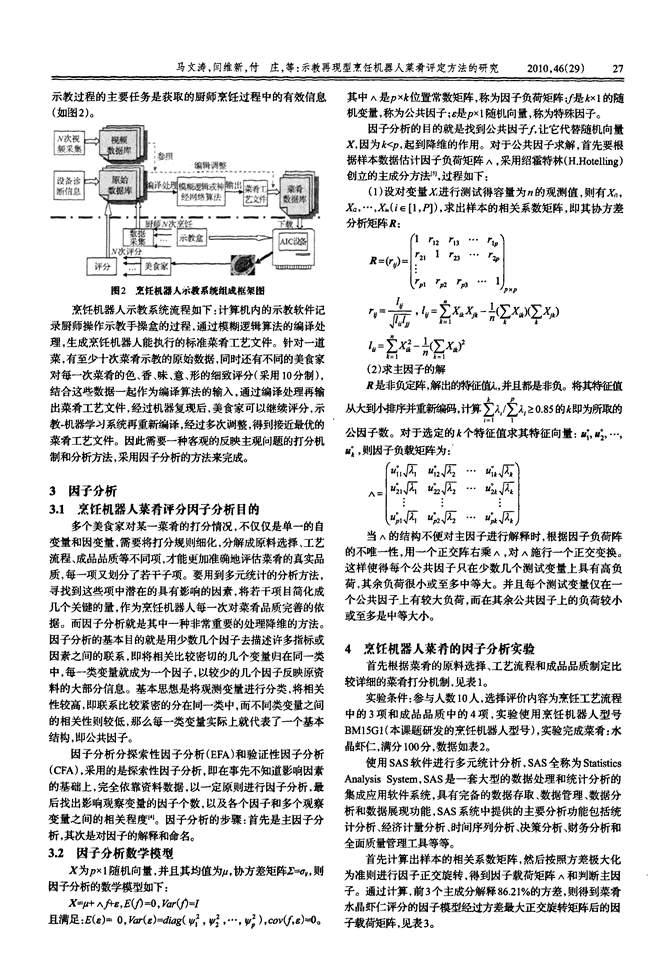
马文涛,闰维新,付庄,等:示教再现型烹饪机器人菜肴评定方法的研究2010,46(29)27示教过程的主要任务是获取的厨师烹饪过程中的有效信息(如图2)。图2烹饪机器人示教系统组成框架图烹饪机器人示教系统流程如下:计算机内的示教软件记录厨师操作示教手操盒的过程,通过模糊逻辑算法的编译处理,生成烹饪机器人能执行的标准菜肴工艺文件。针对一道菜,有至少十次菜肴示教的原始数据,同时还有不同的美食家对每一次菜肴的色、香、味、意、形的细致评分(采用lo分制),结合这些数据一起作为编译算法的输入,通过编译处理再输出菜肴工艺文件,经过机器复现后,美食家可以继续评分,示教.机器学习系统再重新编译,经过多次调整,得到接近最优的菜肴工艺文件。因此需要一种客观的反映主观问题的打分机制和分析方法,采用因子分析的方法来完成。3因子分析3.1烹饪机器人莱肴评分因子分析日的多个美食家对某一菜肴的打分情况,不仅仅是单一的自变量和因变量,需要将打分规则细化,分解成原料选择、工艺流程、成品品质等不同项,才能更加准确地评估菜肴的真实品质,每一项又划分了若干子项。要用到多元统计的分析方法,寻找到这些项中潜在的具有影响的因素,将若干项目简化成几个关键的量,作为烹饪机器人每一次对菜肴品质完善的依据。而因子分析就是其中一种非常重要的处理降维的方法。因子分析的基本目的就是用少数几个因子去描述许多指标或因素之间的联系,即将相关比较密切的几个变量归在同一类中,每一类变量就成为一个因子,以较少的几个因子反映原资料的大部分信息。基本思想是将观测变量进行分类,将相关性较高,即联系比较紧密的分在同一类中,而不同类变量之间的相关性则较低,那么每一类变量实际上就代表了一个基本结构,即公共因子。因子分析分探索性因子分析(EFA)和验证性因子分析(CFA),采用的是探索性因子分析,即在事先不知道影响因素的基础上,完全依靠资料数据,以一定原则进行因子分析,最后找出影响观察变量的因子个数,以及各个因子和多个观察变量之间的相关程度一1。因子分析的步骤:首先是主因子分析,其次是对因子的解释和命名。3.2因子分析数学模理X为p×l随机向量,并且其均值为p,协方差矩阵貉%则因子分析的数学模型如下:X=lz+^加,E∽=o,脚∽可且满足:E(。)=0,Vat"(e)=diag(衍,蟛,⋯,缈;),COY∽占)卸。其中^是pxk位置常数矩阵,称为因子负荷矩阵;f:是kxI的随机变量,称为公共因子;提p×l随机向量,称为特殊因子。因子分析的目的就是找到公共因子厂’让它代替随机向量X,因为k
您可能关注的文档
- 混凝土构件试验回弹法检测及质量评定方法.pdf
- 高性能混凝土耐久性的评定方法研究.pdf
- 化学分析中测量不确定度评定方法概述.doc
- 基于断裂韧性的钢厚板防脆断性能研究(Ⅰ)——分级评定方法.pdf
- 对于MTT 995—2006《选煤厂-脱水设备工艺效果评定方法》的见解.pdf
- 斜拉桥承载力的评定方法.pdf
- 失语症的分类及评定方法.ppt
- 牛肉等级评定方法和标准.pdf
- 食品感官评定方法.ppt
- 金属材料晶粒度数字评定方法及应用.pdf
- 面向任务的三坐标测量机不确定度评定方法研究.pdf
- 阻垢剂性能评定方法问题及相关探讨.pdf
- 先张法预应力空心板火损评定方法及处治对策.pdf
- 外墙外保温系统防火试验与评定方法的研究.pdf
- 旧桥承载能力检算评定方法综述.pdf
- 电子信息本科生专业课成绩评定方法的探讨.doc
- DB34 T 537-2005 农业机械播种作业质量评定方法.pdf
- JB-T 50136.2-1999 隔爆型三相异步电动机隔爆组件可靠性指标评定方法(实验室法).pdf
相关文档
- 青岛市城市桥梁检测技术导则
- DLT1105.1-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则通用要求.pdf
- DLT1105.2-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则超声检测.pdf
- DLT1105.3-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则涡流检测.pdf
- DLT1105.4-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则磁记忆检测.pdf
- DLT694-2012高温紧固螺栓超声波检测技术导则.pdf
- HJ733-2014泄漏和敞开液面排放的挥发性有机物检测技术导则.pdf
- DL937-2005 热交换器管声脉冲检测技术导则 - 下载地址.pdf
- dlt 1 105.1-2010 电站锅炉集箱小口径接管座角焊缝 无损检测技术导则 第1部分:通用要求
- dlt 1 105.3-2010 电站锅炉集箱小口径接管座角焊缝 无损检测技术导则 第3部分:涡流检测
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看