


- 74.00 KB
- 5页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'苏州市职业大学机构认知及分析实训项目报告课程名称:机构分析与零部件设计项目名称:HJ-J12F大型铆钉机的认知及分析专业:机械制造与自动化班级:09机制(2)姓名:陈路路、杨利、王涛、李明乐指导教师:茆琦
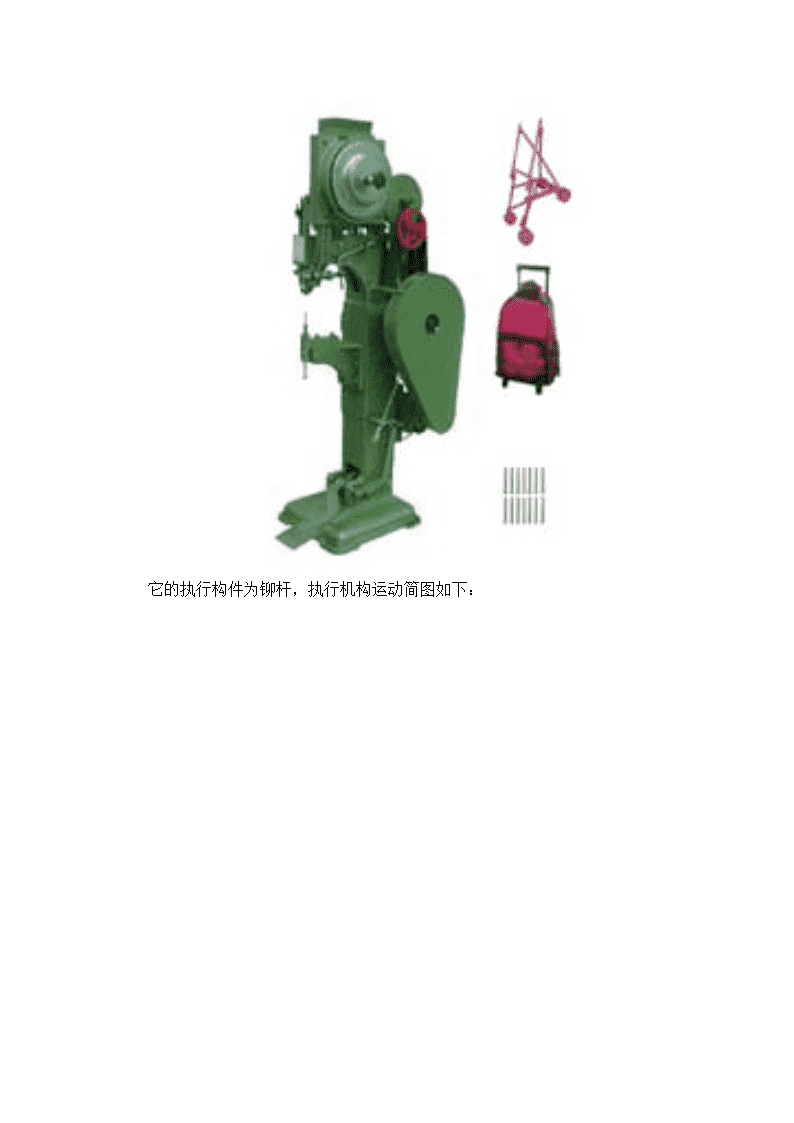
一、项目目的:1)、了解各种机械、机构的基本结构;2)、了解各种机械、机构的工作原理、特点、功能及应用;3)、掌握机构运动简图的绘制方法;4)、掌握机构自由度计算及运动分析方法;5)、熟练掌握AutoCAD绘图方法二、项目实施:1、项目任务1)、考察日常生活中接触到的机器、机构、选定自己感兴趣的,分析其组成、工作原理、运动形式等。2)、绘制选定机器主要执行机构的运动简图,进行机构自由度计算和运动分析。2、选定机器,项目分工4人一组,填写如下具体项目分工表:序号负责人任务1陈路路机构的结构及运动分析、项目报告2杨利3王涛4李明乐3、绘制执行机构运动简图HJ-J12F大型铆钉机的动力方式为:气动;铆接方式分:径向铆接;主要应用于实心铆钉的铆接。实物图片如下:
它的执行构件为铆杆,执行机构运动简图如下:
4、确定机构类型经实际测算,,,。因为,且以这一最短杆的相邻杆为机架,所以四杆机构ABCD为曲柄摇杆机构。在C点处接RRPⅡ级杆组。5、计算机构自由度考虑到C点处有复合铰链,该铆接机构的自由度计算为,要使铆杆有确定运动,需要有一个主动件。6、极位夹角计算因为四杆机构ABCD以曲柄为主动件,所以存在着极位夹角,如下图:
从CAD图纸中可以测算出极位夹角,由行程速度变化系数K的计算公式,可知该机构当曲柄AB逆时针旋转时具有一定的急回特性,但并不强烈。7、要实现最终执行构件的运动,是否可用其他类型的机构,或对本机构做怎样的改进?'
您可能关注的文档
- 风电场工程建设项目报告表
- 子牙示范小城镇新增地块项目报告书简本 - 天津环保
- 汽车检测与维修技术实训项目报告
- 滨水景观带三桥至二郎庙工程建设项目报告书
- 安徽合力股份有限公司轮式装载机一期建设项目报告书
- 建昌中盛加油站建设项目报告表
- 山东滨州三力机械制造有限公司生产铸造件、锻造件、五金制品及其它设备配件项目报告表
- 和合治疗项目报告书
- 黑山羊养殖扶贫资金申请项目报告书
- 《柳城县三星纸厂项目项目报告书简本》
- 天津xxx大街项目报告 (2)
- 宁夏汇丰加油加气站项目报告表-贺兰
- 天津地区图书馆员刻板印象实证研究项目报告.doc
- 大连理工大学软件学院小学期成果展示项目报告
- 亲子户外探索活动对家校合作的调查研究项目报告书
- 丽江纳芮天然香料植物园项目报告
- 天津xxx大街项目报告 (3)
- 本科毕业设计论文--《javaee编程课程设计》期末项目报告书旅游信息管理系统.doc