

- 925.34 KB
- 10页


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'航空学报ActaAeronauticaetAsfrOnautIcaSinicaSep.252012V01.33No.91606—1615ISSN1000.6893ON11-1929/Vhttp:dhkxbbuaa.edu.CRhkxb@buaaeducrl文章编号:1000—6893(2012)09—1606—10放宽静稳定电传客机纵向短周期品质评定方法周垄,王立新*,谭详升北京航空航天大学航空科学与工程学院,北京100191摘要:民用客机强调飞行的安全性和舒适性,由于设计与使用的特点,其短周期模态的自然频率、操纵灵敏度与带宽均较低,时间延迟较大,且一般采用不同于军用运输机的控制律构型。提出以军用规范作为参照的电传客机飞行品质评定及适航审定方法,是现代民用客机飞行控制律设计的关键问题。为改善某放宽静稳定构型客机的短周期飞行品质,设计r迎角、C+和过载构型飞行控制律。按咨询通告AC25—7A所给出的操纵品质等级评定方法(HQRM),采用等效系统评定法、高阶频域法和高阶时域法评定了闭环飞机的短周期飞行品质及适航符合性。结果表明,军用规范条款对时延和带宽的限制对于客机可适当放宽。对于迎角构型,等效系统参数准则、带宽准则和俯仰速率响应准则均适用;过载构型评定应采用等效系统参数准则、俯仰速率响应准则;C+属非常规响应构型,应采用带宽准则和俯仰速率响应准则评定。关键词:客机;放宽静稳定性;短周期模态;飞行控制系统;飞行控制律;操纵品质;控制律构型中图分类号:V212.1文献标识码:A短周期模态是飞机纵向运动的强模态,它决定了飞机的纵向稳定性与操纵性,该模态的改善是飞机飞行控制律设计及闭环操纵品质评定的重要内容。大型民用客机与军用运输机在短周期特性的要求上存在一定差异。军用运输机的飞行剖面涉及空中加油、地形跟踪等A种飞行阶段,对操纵品质要求较高;民机无需完成这些高增益飞行任务,强调的是安全性和乘坐舒适性。因此,对于放宽静稳定性构型电传民机而言,其飞行控制律设计的思路与飞行品质评定的侧重点与军机有所差异。电传客机适航审定的依据是适航条例。但其缺乏针对操稳特性的定量规定:i-s],不利于控制律的设计及优化。针对这一情况,美国联邦航空局(FederalAviationAdministration,FAA)试飞指南AC25—7A中提出了基于操纵品质等级评定方法(HandlingQualitiesRatingMethod,HQRM)的适航审定方法[6],给出了民机适航符合性与军用规范MIL—STnl797A飞行品质等级[7]之间的参考关系。然而,由于军民用两类飞机在操纵品质要求上的差异,现有军标中的一些条款及品质边界经修订后方可应用于民机的适航符合性审定。本文以采用迎角、C‘和过载3种控制律构型的放宽静稳定客机为研究对象,针对其不同的短周期响应特性,依照HQRM,分别采用低阶等效系统、高阶飞机频域响应和高阶飞机时域响应3种评定方法,开展了其短周期飞行品质的评定研究,研究结果对现代电传客机的飞行控制律设计与适航符合性评定等均具有一定的实用参考价值。收稿日期:2011—12.30;退修日期:2012.01.18;录用日期:2012一04.08;网络出版时闻:2012.04—1710:02网络出版地址:WWWcnkinet/kcms/detail/111929V20120417.1002.003.htmI*通讯作者.Tel.:010-82338821E—mail:bhu—wlx@tom.com罨l用器武lZhouK.WangLX,TanXS.Handlingqualitiesassessmentofshortperiodmodeforfly-by-wirepassengerairlinerwithrelaxedstaticstabilitydesignActaAeronauticaetAstronauticaSinica·2012,33(9):1606-1615羼垄.王立薪,谭祥井.教宽静稳定电倍客税额廊短局痢品质铲定方珐,虎空学撮,2012,33(9):1606-1615.
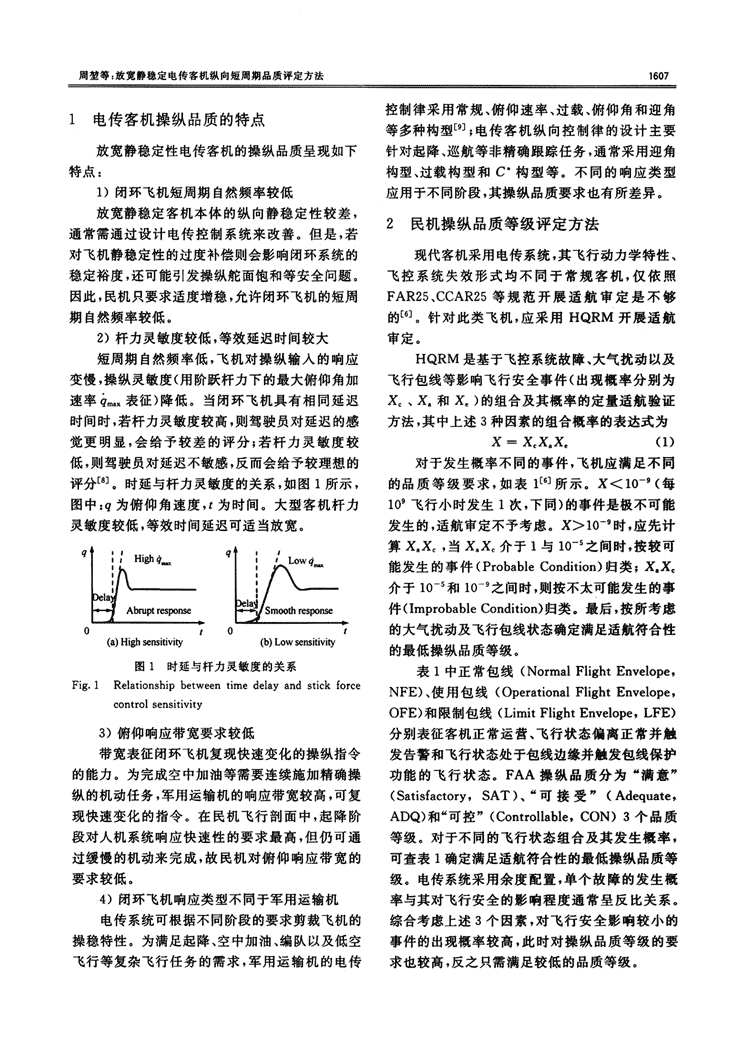
周垄等:放宽静稳定电传客机纵向短周期品质评定方法1电传客机操纵品质的特点放宽静稳定性电传客机的操纵品质呈现如下特点:1)闭环飞机短周期自然频率较低放宽静稳定客机本体的纵向静稳定性较差,通常需通过设计电传控制系统来改善。但是,若对飞机静稳定性的过度补偿则会影响闭环系统的稳定裕度,还可能引发操纵舵面饱和等安全问题。因此,民机只要求适度增稳,允许闭环飞机的短周期自然频率较低。2)杆力灵敏度较低,等效延迟时间较大短周期自然频率低,飞机对操纵输入的响应变幔,操纵灵敏度(用阶跃杆力下的最大俯仰角加速率q。。。。表征)降低。当闭环飞机具有相同延迟时间时,若杆力灵敏度较高,则驾驶员对延迟的感觉更明显,会给予较差的评分;若杆力灵敏度较低,则驾驶员对延迟不敏感,反而会给予较理想的评分[8]。时延与杆力灵敏度的关系,如图1所示,图中:口为俯仰角速度,t为时间。大型客机杆力灵敏度较低,等效时间延迟可适当放宽。睦g逢(a)HIg|Isensitivity(b)Lowsensitivity图1时延与杆力灵敏度的关系Fig.1Relationshipbetweentimedelayandstickforcecontrolsensitivity3)俯仰响应带宽要求较低带宽表征闭环飞机复现快速变化的操纵指令的能力。为完成空中加油等需要连续施加精确操纵的机动任务,军用运输机的响应带宽较高,可复现快速变化的指令。在民机飞行剖面中,起降阶段对人机系统响应快速性的要求最高,但仍可通过缓慢的机动来完成,故民机对俯仰响应带宽的要求较低。4)闭环飞机响应类型不同于军用运输机电传系统可根据不同阶段的要求剪裁飞机的操稳特性。为满足起降、空中加油、编队以及低空飞行等复杂飞行任务的需求,军用运输机的电传控制律采用常规、俯仰速率、过载、俯仰角和迎角等多种构型[93;电传客机纵向控制律的设计主要针对起降、巡航等非精确跟踪任务,通常采用迎角构型、过载构型和C‘构型等。不同的响应类型应用于不同阶段,其操纵品质要求也有所差异。2民机操纵品质等级评定方法现代客机采用电传系统,其飞行动力学特性、飞控系统失效形式均不同于常规客机,仅依照FAR25、CCAR25等规范开展适航审定是不够的[6]。针对此类飞机,应采用HQRM开展适航审定。HQRM是基于飞控系统故障、大气扰动以及飞行包线等影响飞行安全事件(出现概率分别为X。、X。和X。)的组合及其概率的定量适航验证方法,其中上述3种因素的组合概率的表达式为X=X。X.X。(1)对于发生概率不同的事件,飞机应满足不同的品质等级要求,如表1[6]所示。X<10-9(每109飞行小时发生1次,下同)的事件是极不可能发生的,适航审定不予考虑。X>10-9时,应先计算X。X。,当X|X。介于1与10-5之间时,按较可能发生的事件(ProbableCondition)归类;X.X。介于10-5和10.9之间时,则按不太可能发生的事件(ImprobableCondition)归类。最后,按所考虑的大气扰动及飞行包线状态确定满足适航符合性的最低操纵品质等级。表1中正常包线(NormalFlightEnvelope,NFE)、使用包线(OperationalFlightEnvelope,OFE)和限制包线(LimitFlightEnvelope,LFE)分别表征客机正常运营、飞行状态偏离正常并触发告警和飞行状态处于包线边缘并麓发包线保护功能的飞行状态。FAA操纵品质分为“满意”(Satisfactory,SAT)、。可接受”(Adequate,ADQ)和“可控”(Controllable,CON)3个品质等级。对于不同的飞行状态组合及其发生概率,可查表1确定满足适航符合性的最低操纵品质等级。电传系统采用余度配置,单个故障的发生概率与其对飞行安全的影响程度通常呈反比关系。综合考虑上述3个因素,对飞行安全影响较小的事件的出现概率较高,此时对操纵品质等级的要求也较高,反之只需满足较低的品质等级。
1608航空学报Sep252012Vol33No.9为方便开展定量分析,给出了FAA操纵品质等级与Cooper—Harper评分、军用规范MIL—STI)_1797A品质等级的对照关系,如表2所示。表2操纵品质评定对照关系Table2Handlingqualitiesratingchart综上,可借助军用规范中的定量边界,针对特定飞行状态及其组合概率,确定电传客机满足适航符合性的飞行品质定量要求。3高阶闭环飞机的短周期品质评定方法FAR25B分部仅对民用飞机的短周期阻尼做出了重阻尼的要求(短周期振荡幅值须在2个周期内衰减至初始值的1/10,相当于阻尼比k一0.20)。放宽静稳定客机本体受扰后姿态回复较慢,在大迎角状态下易危及飞行安全。对此,行业标准ARP4104[1叫也只作了“短周期响应不应过于迟钝或过于灵敏”的建议。可见民机设计及审定时,对短周期模态的要求较模糊。相较之下,MIL—STD-1797A规范[71中电传飞机该模态特性的要求较为全面及详尽,共给出了3类评定方法,6个准则,可供电传客机设计参考。3.1等效系统评定方法操纵期望参数(ControlAnticipationParam—eter,CAP)和等效系统参数准则属等效系统评定方法,对具有常规响应类型的飞机较适用。该方法假定闭环飞机的短周期振荡具有常规响应形式[7。8],即姿态和轨迹响应(分别由俯仰速率q和瞬时转动中心过载《表征)均呈现阻尼比、自然频率分别为岛、60。。。的二阶振荡特性,而轨迹相对于姿态存在小幅滞后(由时间常数L表征)。闭环飞机姿态及轨迹响应的时间延迟分别为如、“。CAP准则针对闭环飞机姿态与轨迹的运动关系、短周期动稳定性、时延以及纵向静操纵性等多方面进行评定。等效系统参数准则采用叫。。。To、}。,和即等参数开展评定[7。81(品质边界图可参见算例部分),反映了闭环飞机短周期运动中姿态与轨迹变化的关系:∞。。。越大,飞机的初始姿态响应越急剧,反之则越迟钝;L越大,姿态与轨迹响应的分离越明显,俯仰姿态初始响应也显得越急剧。此外,该准则还评定岛、∞。。,和"CO等参数,意在保证理想的短周期阻尼、频率及时延特性。虽然评定时未涉及过载灵敏度咒/口、操纵力梯度F。/咒。等参数,评定内容不及CAP准则全面,但原理相近,且流程简单,故拟采用该准则进行评定。3.2高阶系统频域方法对于非常规响应类型的飞机,等效拟配的失配度较大,应直接针对高阶飞机的响应特性来评定其短周期品质。带宽准则和闭环准则属高阶系统频域评定方法。其中,带宽准则主要针对闭环飞机,考查人机系统复现快速变化指令的能力;闭环准则针对人机闭环系统,重点考虑其动稳定性。在起降状态,电传客机对跟随操纵指令的要求比其他飞行状态更高,故本文拟采用带宽准则来进行评定。带宽tOBW表征驾驶员施加操纵时,在同时满足6dB、45。稳定裕度的前提下,人机闭环系统能够复现的快速变化的俯仰姿态指令的最大频
周垫等:放宽静稳定电传客机纵向短周期品质评定方法1609率‘113;r。表征闭环飞机高频段相位滞后对人机系统稳定裕度的影响,与等效延迟时间功相似。综上,带宽准则在兼顾人机系统稳定性的同时,通过规定可接受的最小叫。w和最大rp(包络图见算例)确保闭环飞机能快速跟随操纵指令。3.3高阶系统时域方法俯仰速率准则和Gibson准则口蜘属高阶系统时域评定方法。其中,俯仰速率准则主要针对巡航和起降状态闭环飞机的俯仰速率响应;Gibson准则主要针对高机动性飞机精确跟踪和场域阶段的跟踪及回落特性,但未给出飞行品质等级的量化边界。综上,前者与电传客机的使用及设计特点较吻合,故采用此准则来进行评定。俯仰速率准则针对闭环飞机的短周期俯仰速率阶跃响应开展评定,指标参数包括有效时间延迟t。、瞬态峰值比△q2/Aq。、上升时间△£,以及每g杆力F。摊=_。与俯仰角加速率对杆力响应峰值IaF_1l⋯的乘积(F。n21)l舂F_1I⋯。可见该准则侧重于闭环飞机姿态与轨迹响应的协调性、以及短周期阻尼、操纵特性,评定内容较全面,与CAP准则相当[7]。由于是时域准则,其适用于各种常规或非常规响应的飞机。在等效系统评定方法不适用时,建议采用此准则进行替代。4电传客机建模基于波音747—100飞机u21,将机翼前移1m,平尾面积减小约40m2,以减小其稳定裕度。表3示出了进近状态(马赫数Ma一0.2、海平面、着陆构型)和巡航状态(Ma一0.5、高度6096m、干净构型)下,放宽静稳定性(RelaxedStaticStability,RSS)前后飞机短周期频率∞。。。及CAP的变化。表3本体CAP等级评定Table3GradingsofbareairframeCAP可见随着纵向静稳定裕度的减小,进近和巡航状态飞机本体的短周期自然频率叫。。。分别下降为0.54rad/s、0.60rad/s,CAP也由“满意”等级下降为“可接受”等级,不满足HQRM对正常状态下飞行品质等级的要求。为改善短周期飞行品质,参照空客A320飞机的纵向飞行控制律[13],设计了C。、法向过载行:和迎角a3种构型的飞行控制律,如图2所示。图中:Kr和K。分别为控制律比例增益和积分增益;K。为水平安定面配平增益;K。为俯仰阻尼器增益;K。c·、K¨和纸。分别为C。、过载和迎角增稳反馈增益;晶和菠分别为水平安定面偏度和升降舵偏角。(a}c.mode(b)Normalloadfactormode(c)Angleofattackmode图2纵向飞行控制律结构图Fig.2Structureoflongitudinalflightcontrollaws飞机处于低速飞行状态时,q是纵向运动与驾驶员所感受的主要变量,控制律采用C’构型如图2(a)所示。C+一An:+(Vco/g)q是法向过载增量△咒。和q的混合变量,交叉速度V。o(此处取为120m/s)与重力加速度g表征了C‘指令中过载与俯仰速率的比例,当空速V—Vco时,c‘指令中两部分的幅值相等。控制律的内回路由俯仰阻尼器和增稳反馈回路组成.夕h回路由比例一积分通道和侧杆指令成形环节组成(杆力梯度取为50N/g[7’1。”],各构型同),提供控制增稳功能。自动配平环节对升降舵舵偏增量△占。进行积分,通过平尾偏转艿H卸除升降舵的铰链力矩。
航空学报Sop.252012Yol33No9飞机处于中高速巡航飞行状态时,,z:是纵向运动与驾驶员感受的主要变量,此时控制律采用过载构型(见图2(b))。其结构与c。控制律类似,只是增稳反馈和机动指令回路的反馈信号为n。,杆力指令与过载对应。迎角构型控制律如图2(c)所示,主要用于速度过低、迎角过大时的飞行包线保护。其结构与前两种构型的控制律类似,增稳反馈和指令反馈信号为迎角,该控制构型不具备自动配平功能。对于3种控制构型,可根据操纵品质的设计要求,通过飞机本体运动模型的短周期简化,求取闭环飞机响应对杆力指令的传递函数,并进行零极点配置,来完成控制律的调参设计[13。。5评定算例由于所评定的飞行状态(进近及巡航)均处于正常包线内,飞控系统处于正常工作状态,不考虑大气扰动对短周期模态特性的影响(大气扰动可视为对短周期模态的激励,对短周期特性的实际影响很小),故满足适航符合性的最低操纵品质等级应按“正常包线+轻微大气扰动+较可能发生的事件”的组合确定,也即飞行品质应是“令人满意的”。5.1迎角构型闭环品质评定在电传客机的3种控制构型中,迎角构型下闭环飞机的响应特性与常规飞机最接近(飞机处于进近状态,如图3所示)。该构型用于包线保护,应能快速跟随操纵杆生成的迎角指令。控制律按岛一0.7、叫。。一1.5rad/s调参。实际飞机的本体运动特性由4阶线化运动方程表征[12|,升降舵特性以惯性环节表征。tfs(a)Angloofattack“s(b1Pitchrateandloadfactor图3闭环飞机(迎角构型)俯仰轴阶跃响应Fig.3Pitchaxisstep—responsewithaugmentedaircraft(angleofattackmode)1)等效系统方法评定拟配结果为f牮(引一0.0042(s+0.5286)。-ol‰F。(5)s2+2.1818s+1.8433。<.(2)l稚。:("一0.0340031;。--0.【F。(s)一s2+2.1818s+1.8433。式中:F。为纵向操纵力,N。等效参数岛一0.80、叫。。。T0—2.57,操纵品质等级为“满意”,如图4所示。对应的延迟时间为0.14S,若简单按照军标评定,仅达到“可接受”等级。MIL—STD-1797A[73给定的延迟时间等级并未考虑杆力灵敏度与等效时延的关系‘8’16]。由等效(Dnsp一图4迎角控制构型下的短周期评定结果(进近状态)Fig.4Shorttermpitchresponseratingofangleofattackcontrolmode(powerapproach)
周垫等:放宽静稳定电传客机纵向短周期品质评定方法1.36rad/s,可知杆力灵敏度较低,等效时延限制应适当放宽。针对运输类飞机,文献[16]将“满意”、“可接受”、“可控”等级的边界分别划为功<0.20S、功
您可能关注的文档
- GB-T 13299-91 钢的显微组织评定方法
- GBT 13299-91钢的显微组织评定方法
- GBT 13302-1991钢中石墨碳显微评定方法
- 疼痛的评定方法及中医治疗方法与原则
- GBT 26155.2-2012 工业过程测量和控制系统用智能电动执行机构 第2部分:性能评定方法
- 医疗器械生产质量管理规范无菌医疗器械实施细则(试行)和检查评定方法
- 基于图像处理技术的铝合金腐蚀等级评定方法
- 服役环境下的军机金属结构环境损伤评定方法
- 复合材料层板超声检测缺陷评定方法分析
- 基于Excel VBA的水下地形测量数据精度评定方法
- 多输出量测量模型的不确定度评定方法
- 大尺寸产品圆度误差的快速评定方法及应用
- 厂焊长钢轨焊接接头平直度及外观质量检测评定方法
- 公路隧道工程质量交工验收检测与评定方法体系_图文(精)
- 公路隧道工程质量交工验收检测与评定方法体系_图文(精)
- 药效学拓展阅读药物不良反应因果关系评定方法.doc
- 香精专用术语及香气评定方法[1].ppt
- 汽车底盘产品质量检验评定方法
相关文档
- 青岛市城市桥梁检测技术导则
- DLT1105.1-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则通用要求.pdf
- DLT1105.2-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则超声检测.pdf
- DLT1105.3-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则涡流检测.pdf
- DLT1105.4-2010电站锅炉集箱小口径接管座角焊缝无损检测技术导则磁记忆检测.pdf
- DLT694-2012高温紧固螺栓超声波检测技术导则.pdf
- HJ733-2014泄漏和敞开液面排放的挥发性有机物检测技术导则.pdf
- DL937-2005 热交换器管声脉冲检测技术导则 - 下载地址.pdf
- dlt 1 105.1-2010 电站锅炉集箱小口径接管座角焊缝 无损检测技术导则 第1部分:通用要求
- dlt 1 105.3-2010 电站锅炉集箱小口径接管座角焊缝 无损检测技术导则 第3部分:涡流检测
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看