

- 829.88 KB
- 50页
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'YF附着升降脚手架设计计算书共50页第1页YF附着式升降脚手架设计计算书江苏云山模架工程有限公司1
YF附着升降脚手架设计计算书共50页第2页目录1总则-----------------------------------------------------------32主要技术参数---------------------------------------------------33设计方法、计算系数与许用应力-----------------------------------54计算力学模型、计算工况与计算载荷--------------------------------64.1计算力学模型-------------------------------------------------64.2计算工况----------------------------------------------------64.3计算载荷----------------------------------------------------75架体结构内力计算----------------------------------------------115.1计算项目---------------------------------------------------115.2架体结构内力计算-------------------------------------------115.3架体各部分的几何特性---------------------------------------245.4架体定型框架的校核计算-------------------------------------265.5架体构架的校核计算-----------------------------------------426附着支座计算-----------------------------------------------457建筑结构的砼强度验算---------------------------------------482
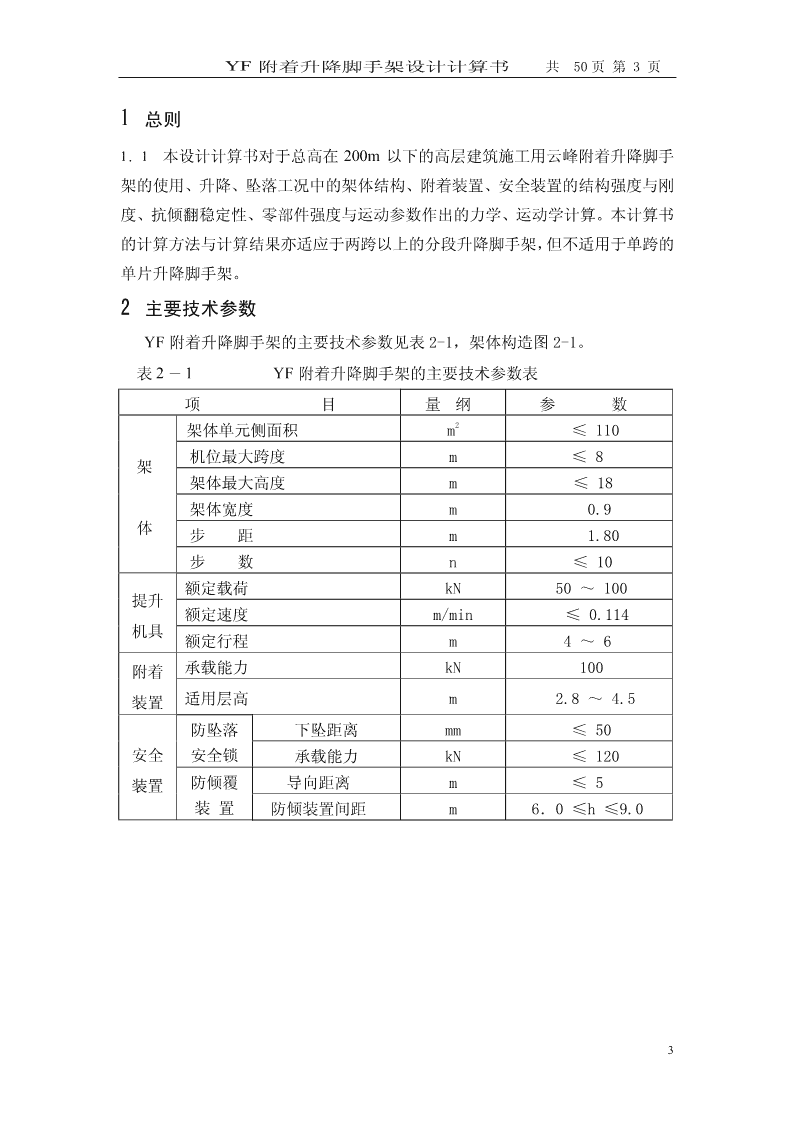
YF附着升降脚手架设计计算书共50页第3页1总则1.1本设计计算书对于总高在200m以下的高层建筑施工用云峰附着升降脚手架的使用、升降、坠落工况中的架体结构、附着装置、安全装置的结构强度与刚度、抗倾翻稳定性、零部件强度与运动参数作出的力学、运动学计算。本计算书的计算方法与计算结果亦适应于两跨以上的分段升降脚手架,但不适用于单跨的单片升降脚手架。2主要技术参数YF附着升降脚手架的主要技术参数见表2-1,架体构造图2-1。表2—1YF附着升降脚手架的主要技术参数表项目量纲参数2架体单元侧面积m≤110机位最大跨度m≤8架架体最大高度m≤18架体宽度m0.9体步距m1.80步数n≤10额定载荷kN50~100提升额定速度m/min≤0.114机具额定行程m4~6附着承载能力kN100装置适用层高m2.8~4.5防坠落下坠距离mm≤50安全安全锁承载能力kN≤120装置防倾覆导向距离m≤5装置防倾装置间距m6.0≤h≤9.03
YF附着升降脚手架设计计算书共50页第4页第四层第三层第二层第一层图2—1YF附着式升降脚手架单元结构示意图4
YF附着升降脚手架设计计算书共50页第5页3设计方法、计算系数与许用应力YF附着升降脚手架架体由水平梁架、竖向主框架、架体构架组成,附着装置由附墙支座、穿墙螺栓副等组成,安全装置由防坠落装置、防倾覆装置组成。根据参考文献[2],架体与附着装置使用“概率极限状态法”进行设计计算,计算时应遵照以下原则:(1)对架体结构与构件采用分项系数的设计表达式进行计算;(2)对架体结构与构件进行两种极限状态的计算:①承载能力的极限状态;②正常使用的极限状态;用承载能力的极限状态计算架体结构与附着装置时,应采用载荷的设计值;按正常使用的极限状态计算架体结构与附着装置时,应采用荷载的标准值。升降机具与安全装置使用“许用应力法”进行设计计算及校核。以上各部分的计算方法与计算系数见表3—1。表3—1YF附着升降脚手架的计算方法与计算系数计算计算系数计算部位方法使用工况升降、坠落工况架体构架γ0(γG、ψγQ)/架体水平梁架概率极限结构竖向主框架状态法γ0(γG、ψγQ)γ0(γG、ψγQ)附着支承装置升降动力设备、安全装置/容许应力法γ2索具、吊具γ1注:γ—结构重要性系数,脚手架为临时设施,取γ=0.9;00γ—恒载分项系数,γ=1.35;GGγ—活载分项系数,γ=1.4;QQψ—活载组合系数,施工荷载ψ=0.7,脚手板积灰ψ=0.9,雪荷cicici载ψ=0.7,风荷载ψ=0.6;ciciγ、γ—荷载变化系数,取γ=1.3、γ=2。1212由参考文献[9]查知附着升降脚手架各部分材料的屈服应力、安全系数与许用应力并代入表3—2。5
YF附着升降脚手架设计计算书共50页第6页表3—2施工机具与安全装置的安全系数与材料许用应力许用应力材料屈服应力安全抗拉、抗压、抗剪抗挤压用途牌号σs(Mpa)系数抗弯[σ](Mpa)[τ](MPa)[σj](MPa)架体、附着装置、Q235A23515690235机具、安全装置、紧固件45353235136353销轴1.5HT20020013377200传动件E430323515690235各种结构件注:①[τ]=0.567[σ];②[σj]=1.5[σ];③专用起重吊具、索具的安全系数按参考文献[5]GB3811-83《起重机设计规范》选取最大值n=6。4计算力学模型、计算工况与计算荷载4.1计算力学模型工程应用中的附着升降脚手架架体为多次超静定等截面不等跨连续梁,其精确计算较为复杂。在本设计计算书中,从偏于安全的基点出发,按脚手架架体在工程使用中的最大允许跨度简化为多次超静定等截面等跨连续梁。在立面上,水平梁架与架体构架可视为承受水平风荷载的等截面连续扁梁,机位处相当于该连续梁的铰支座;在剖面内产生弯矩与剪力;在立面中,水平梁架为连续梁,承受垂直自重荷载、施工荷载后在立面内产生弯矩与剪力。4.2计算工况附着升降脚手架的计算工况分使用工况、升降工况,各工况的计算力学模型见图4—1、图4—2、。4.3计算荷载4.3.1自重线荷载qGl升降自重荷载计算部件应包括水平梁架、竖向主框架、连接螺栓、钢管、扣件、脚手板、安全网等连接为整体并共同升降的构件,计算结果见表4—1。4.3.2使用荷载qQ主体施工中为:qQ=(2×3)×1.25=7.5(kN/m),装饰施工中为:qQ=(3×2)×1.25=7.5(kN/m),6
YF附着升降脚手架设计计算书共50页第7页升降及坠落工况中为:q’Q=1.0×1.25=1.25(kN/m)。4.3.3风荷载标准值wk因脚手架外立面直接承受风荷载,wk=βgZμsμZw0(4—1)式中:βZ—高度z处的风振系数,Aμs—μ=1.3ϕ=1.3×d(4—2)sAy式中:Ad/Ay—架体挡风面积/架体迎风面积,脚手架用密目式安全网围护,其挡风系数为0.428,即:Ad/Ay=0.428;则知:μs=1.3×0.428=0.564;μζ—风压高度变化系数,计算书按照200m以下、地面粗糙度C类的高层建筑考虑,则取μζ=2.30;22w0—基本风压(kN/m),基本风压为w01=0.40(kN/m),将其作为使用工况基本风压;在升降及坠落工况中的基本风压可取2为w02=0.25(kN/m);则本附着升降脚手架风荷载标准值为:2使用工况中:wk1=1×0.564×2.30×0.40=0.537(kN/m),2升降、坠落工况中:wk2=1×0.564×2.30×0.25=0.336(kN/m),当架体总高度H0=13.5(m)时,沿架体长度方向的风载线荷载为:使用工况中:w1=w01H0=0.537×13.5=7.14(kN/m),升降:w2=w02H0=0.336×13.5=4.47(kN/m);将计算结果代入表4—2。7
YF附着升降脚手架设计计算书共50页第8页(a)水平梁架qw1F11QF12G0F13Rz1(a)使用工况图4—1使用工况架体水平梁架、竖向主框架计算力学模型8
YF附着升降脚手架设计计算书共50页第9页(a)水平梁架F21qw2QGF220P(b)竖向主框架图4—2升降工况架体水平梁架、竖向主框架计算力学模型9
YF附着升降脚手架设计计算书共50页第10页将计算出的各种荷载代入表4—2汇总。表4—1L0=8m、H0=13.5m(6步+2.1m防护拦)架体自重荷载计算表计算材型线重长度单重件数单跨重单跨线荷载构件(mm)(kg/m)(m)(kg)(件)量(kg)(kN/m)大横杆1.3125.03820小横杆0.7202.76512418水立杆φ48×3.842.2708.71712(焊缝重平主斜撑杆3.52.1478.24410量约为梁机位斜杆1.9747.58021%结构架水平斜杆1.5005.76010重量)节点板0.1580//紧固件0.1080qG=ΣGi/L0横向杆0.8423.2334149=3231×9.8外立杆φ48×3.841.9007.2966(焊缝重竖-3×10/8向斜腹杆3.51.8307.0275量约为=3.958主连杆0.0500.19261%结构框角钢∟63×65.7210.160.9152重量)架导轨[6.36.633.80025.1942节点板//0.5884冲天杆1.9007.29655架大横杆8.00026.1111φ48×体小横杆3.841.2004.612517843.5剪刀撑15.6960.232构栏杆搁栅8.00030.7228架对接扣件//1.8445直角扣件KT330//1.38150307旋转扣件//1.461222防水平竹笆1.5m×0.9m8kg/m//50.4m40322护内防护板δ20mm16kg/m//4m5422用密目安全网18000.5kg/m800012.24m755.822品大眼安全网8001.0kg/m80006.4m210
YF附着升降脚手架设计计算书共50页第11页表4—2跨度8m、高度13.5m(6步+2.1m栏杆)架体计算荷载汇总载荷自重荷载施工荷载风荷载残留施工荷载机位静载工况qG(kN/m)qQ(kN/m)qW(kN/m)q’Q(kN/m)RI(kN)使用工况7.57.14/91.6643.958升降工况/4.471.2541.6645.架体结构计算5.1计算项目(1)水平梁架的强度、刚度、稳定性校核计算;(2)竖向主框架的强度、刚度、稳定性校核计算;架体构架水平纵向杆、水平横向杆的抗弯强度、抗弯刚度校核,架体构架冲天杆的稳定性校核;(3)防倾覆导轨的强度、刚度及稳定性校核计算。5.2架体水平梁架结构内力计算5.2.1立面荷载的结构内力(1)自重荷载qG、施工荷载qQ、残留施工荷载q’Q产生的结构内力由图5—1(a)知,自重荷载qG、施工荷载qQ、残留施工荷载q’Q垂直施加在等截面等跨五跨连续梁上。11
YF附着升降脚手架设计计算书共50页第12页(a)(b)(c)(d)图5—1架体水平梁架计算力学模型12
YF附着升降脚手架设计计算书共50页第13页1)支座弯矩计算式对图5—1(b):M=M=M=M=M=M=0XA2XB2XC2XD2XE2XF2a1600对图5—1(c):查《建筑静力结构计算手册》表1-10:α===0.2,l80002ω=0.16,2RαΩ=PalωRα=Pa×8×0.16=6.48Pa,M=M=0XA3XF3264264M=M=−Ω=−×6.48P=−1.023PXB3XE3aa209l209×8198198M=M=−Ω=−×6.48P=−0.767PXC3XD3aa209l209×8b3200对图5—1(d):查参考文献[5]表1-10:α===0.4,l80002ω=0.0384,2RαΩ=PalωRα=Pa×8×0.384=2.46Pa,M=M=0XA4XF4264264M=M=−Ω=−×2.46P=−0.388P,XB4XE4aa209l209×8198198M=M=−Ω=−×2.46P=−0.291P;XC4XD4aa209l209×8将以上各分图的支座弯矩在同一支座上进行线性迭加,则可求出各支座的支座弯矩:M=M=0,XAXFMXB=MXB1+MXB2+MXB3+MXB4=0+0−1.023Pa−0.388Pa=−1.411Pa=MXE,M=M+M+M+M=0+0−0.767P−0.291P=−1.058P=M,XCXC1XC2XC3XC4aaaXD对于图5—1(a)的计算力学模型有:F=4P+2P(5—1)iabP=2P(5—2)ab代入以上各支座弯矩计算式有:1M=M=−1.411×F=−0.2822F(5—3)XBXEii51M=M=−1.058×F=−0.2116F(5—4)XCXDii42)支座反力计算式13
YF附着升降脚手架设计计算书共50页第14页①取图5—1计算力学模型中的A–B段为隔离体如图5—2(a),则有:∑MXA=01.6Pa+3.2Pa+4.8Pa+6.4Pa+MXB−8(RZB1−Pb)=016P+8P+M3.2F+0.8F+0.2822FabXBiiiR===0.5353FZB1i88∑Y1=04Pa+2Pb−RZB1−RZA=0R=F−R=F−0.5353F=0.4647FZAiZB!iii②取图5—1计算力学模型中的B–C段为隔离体如图5—2(b),则有:∑M=01.6P+3.2P+4.8P+6.4P+M−M−8(R−P)=0XBaaaaXCXBZC1b16P+8P+M−MabXCXBR=ZC183.2F+0.8F+0.2116F−0.2822Fiiii==0.4912Fi8∑Y2=04Pa+2Pb−RZB2−RZC1=0R=4P+2P−R=F−0.4912F=0.5088FZB2abZC1iii③取图5—1计算力学模型中的C–D段为隔离体如图5—2(c),则有:∑M=0XC1.6Pa+3.2Pa+4.8Pa+6.4Pa+MXD−MXC−8(RZD1−Pb)=016P+8P3.2F+0.8FabiiRZD1===0.5Fi88∑Y=03RZC2=4Pa+2Pb−RZD1=Fi−0.5Fi=0.5Fi将垂直方向上各支座反力的分力分别线形迭加,并根据结构的对称性,对称位置的支座反力相等,则有:RZA=RZF=0.4647Fi(5—5)RZB=RZB1+RZB2=0.5353Fi+0.5088Fi=1.0441Fi=RZE(5—6)RZC=RZC1+RZC2=0.4912Fi+0.5Fi=0.9912Fi=RZD(5—7)3)自重荷载qG引起的支座弯矩与支座反力:由表4—2知,自重荷载qG=3.958(kN/m),通过架体构架的冲天杆以集中力的形式施加在水平梁架上,则各冲天杆上的荷载为:qGl=4Pa+2PB=5PaPa=0.2qGl=0.2×3.958×8=6.333(kN)14
YF附着升降脚手架设计计算书共50页第15页由自重荷载qG在一跨上引起的总荷载为:FG=qGl=3.958×8=31.664(kN)由自重荷载qG引起的支座弯矩为:MXBG=MXEG=−0.2822FG=−0.2822×31.664=−8.935(kN)MXCG=MXDG=−0.2116FG=−0.2116×31.664=−6.70(kN)由自重荷载qG引起的支座反力为:RZAG=RZFG=0.4647FG=0.4647×31.664=14.714(kN)RZBG=RZEG=1.0441FG=1.0441×31.664=33.057(kN)RZCG=RZDG=0.9912FG=0.9912×31.664=31.385(kN)4)施工荷载qQ引起的支座弯矩与支座反力:由施工荷载qQ引起的支座弯矩与支座反力计算方法与以上相同,仅须将qG更换为qQ即可。则有:由施工荷载qQ在一跨上引起的总荷载为:FQ=qQl=7.5×8=60(kN)由施工荷载qQ引起的支座弯矩为:M=M=−0.2822F=−0.2822×60=−16.932(kN)XBQXEQQM=M=−0.2116F=−0.2116×60=−12.696(kN)XCQXDQQ由施工荷载qQ引起的支座反力为:R=R=1.0441F=1.0441×60=62.646(kN)ZBQZEQQR=R=0.4647F=0.4647×60=27.882(kN)ZAQZFQQR=R=0.9912F=0.9912×60=59.472(kN)ZCQZDQQ5)残余施工荷载q’Q引起的支座弯矩与支座反力:由残余施工荷载q’Q引起的支座弯矩与支座反力计算方法与以上相同,仅须将qG更换为q’Q即可。则有:由残余施工荷载q’Q在一跨上引起的总荷载为:F"=q"l=1.25×8=10(kN)QQ由残余施工荷载q’Q引起的支座弯矩为:15
YF附着升降脚手架设计计算书共50页第16页M"=M"=−0.2822F"=−0.2822×10=−2.822(kN)XBQXEQQM"=M"=−0.2116F"=−0.2116×10=−2.116(kN)XCQXDQQ由残余施工荷载q’Q引起的支座反力为:R"=R"=0.4647F"=0.4647×10=4.647(kN)ZAQZFQQR"=R"=1.0441F"=1.0441×10=10.441(kN)ZBQZEQQR"=R"=0.9912F"=0.9912×10=9.912(kN)ZCQZDQQ在立面上作连续梁的内力图如图5—3。5.2.2水平荷载产生的结构内力附着升降脚手架的水平荷载为风荷载wi,如图5—4,在水平面上可将架体结构视为截面高度为B(架体宽度)、厚度为H0(架体高度)的等跨连续梁,将竖向主框架视为支座。根据参考文献[4]中表(3-2)可查得由风荷载wi引起的支座弯矩与支座反力。在架体结构中产生的内力由风荷载wi引起的支座弯矩为:M=M=0(5—8)ZAWZFW22M=−0.105wl=−0.105×8×w=−6.72w(5—9)ZBWiii22M=−0.079wl=−0.079×8×w=−5.056w(5—10)ZCWiii由风荷载wi引起的支座反力为:R=0.394wl=0.394×8w=3.152w(5—11)XAWiiiR=1.132wl=1.132×8w=9.056w(5—12)XBWiiiR=0.9912wl=0.9912×8w=7.93w(5—13)XCWiii(1)使用工况风荷载w1引起的支座弯矩与支座反力:将使用工况风线荷载w1=7.14(kN/m)代入式(5—8)~(5—13)可求得:由使用工况风荷载w1引起的支座弯矩为:M=−6.72w=−6.72×7.14=−47.98=M(kN·m)ZBW11ZEW1M=−5.056w=−5.056×7.14=−36.10=M(kN·m)ZCW11ZDW116
YF附着升降脚手架设计计算书共50页第17页由使用工况风荷载w1引起的支座反力为:R=3.152w=3.152×7.14=22.51=R(kN)XAW11XFW1R=9.056w=9.056×7.14=64.66=R(kN)XBW11XEW1R=7.93w=7.93×7.14=56.62=R(kN)XCW11XDW1(2)升降工况风荷载w2引起的支座弯矩与支座反力:将升降工况风线荷载w2=4.47(kN/m)代入式(5—8)~(5—13)可求得:由升降工况风荷载w2引起的支座弯矩为:M=−6.72w=−6.72×4.47=−30.04=M(kN·m)ZBW22ZEW2M=−5.056w=−5.056×4.47=−22.62=M(kN·m)ZCW22ZDW2由升降工况风荷载w2引起的支座反力为:R=3.152w=3.152×4.47=14.089=R(kN)XAW22XFW2R=9.056w=9.056×4.47=40.48=R(kN)XBW22XEW2R=7.93w=7.93×4.47=35.45=R(kN)XCW22ZDW25.2.2.1在水平风荷载作用下水平梁架的内力与支反力在5.2.1.2节中,在水平面内将架体构架视为连续梁,水平梁架仅是该梁的一部分,且其在水平面内的刚度与架体相同,故水平梁架的荷载与应力可从整个架体的荷载与应力中分解,不必另行计算。5.2.2.2在水平风荷载作用下竖向主框架的内力与支反力在水平风荷载wi作用下,架体将竖向主框架作为支座,承受了架体的水平风荷载,而在剖面内,该支座实际上为高十余米并具有三个以上水平支承点的一次超静定连续梁,见图5—5。因竖向主框架为等截面连续梁,据参考文献[4],可用三弯矩方程计算各支座的支座弯矩:ΦΦllllBAi2(ii+1)i+16(ii+1)(5—14)M+M++M=−+i−1ii+1IIIIIIiii+1i+11i+1列出J点的三弯矩方程:17
YF附着升降脚手架设计计算书共50页第18页(a)A-B段计算图(b)B-C段计算图(c)C-D段计算图图5—2支反力计算用架体隔离体图(a)载荷(b)弯矩图(c)剪力图图5—3架体内力图18
YF附着升降脚手架设计计算书共50页第19页图5—4架体承受水平风荷载时的计算力学模型qwQG0(a)机位剖面计算力学模型(b)架体段荷载计算图图5—5架体竖向主框架计算力学模型19
YF附着升降脚手架设计计算书共50页第20页ΦΦllllBAM1+2M(1+2)+M3=−6(1+2)(5—15)KJSIIIIII112312据参考文献[4]查得:33Φ136000qw9Φ133000qw9A=ql==9×10q,B=ql==1.125×10q2w2w1w1w24242424并将127l=3000,l=6000,l=4500,I=I=I,M=0,M=−ql=−1.013×10q123123KSw3w2一并代入式(5—15),有:792M(3000+6000)−4500×1.013×10q=−6×(1.125+9)×10qYJWww10整得:(4.559−6.075)×105(5—16)M=−q=−8.422×10qXJW18000ww取图5—5(a)计算力学模型中的K—J段为隔离体如图5—5(b),则有:12ΣM=0,ql−Rl−M=0Ki2w1XK1YJW2解出:112130005R=(ql+M)=(+8.422×10)q=1781q(N)(5—17)XKw1YJWwwl2300021取图5—5(a)计算力学模型中的整根梁为隔离体:1212ΣM=0ql−Rl−q(l+l)+Rl=0Jiw1XK1w23XS222122RXKl1+qw[(l2+l3)−l1]1781+0.5(105002−30002)整得:R=2=q(N)(5—18)XSwl60002R=8438q(N)XSwΣX=0R+R+R-qH=0iXKXJXSw0整得:R=qH−R−R=(13500−1781−8438)q=3281q(N)(5—19)XJw0XKXSww式(5—17)、(5—18)、(5—19)中架体竖向主框架沿竖向分布的水平线荷载据架体竖向主框架在水平面内的最大支反力求得,因B、E支座的水平反力为最大,则有:RXBWjq=(kN/m)(5—20)wH0将各工况的R代入上式计算各工况中竖向主框架的支座弯矩及支座反力。XBWi20
YF附着升降脚手架设计计算书共50页第21页(1)使用工况RXBW164.66竖向主框架沿竖向的水平线荷载:q===4.79(kN/m)w1H13.50支座弯矩:77M=−1.013×10×4.79=−4.852×10(kN·m)YSW156M=−8.422×10×4.79=−4.034×10(kN·m)YJW1M=0(kN·m)YKW1支座反力:R=1781q=1781×4.79=8531(N)=8.531(kN)XKW1w1R=3281q=3281×4.79=15716(N)=15.716(kN)XJW1w1R=8438q=8438×4.79=40413(N)=40.413(kN)XSW1w1(2)升降工况:因RXS=0,竖向主框架为静定结构,则有:竖向主框架沿竖向的水平线荷载:RXBW240.483(kN/m),q===w2H13.50支座弯矩:66M=−2.045×10×3=−6.133×10(kN·m)YJW277M=−1.682×10×3=−5.044×10(kN·m)YSW21支座反力:ΣM=0,Rl−qH(H−l)=0XJXJW22w2002213.5R=×(0.5×13.5−6)×3=5.063(kN)XJW26R=qH−R=3×13.5−5.063=35.437(kN)XSW2w20XKW25.2.3垂直荷载在竖向主框架中产生的内力5.2.3.1垂直荷载本计算书对竖向主框架结构内力采用的计算方法为节点法,该方法认为结构中每根杆件均为两力杆,即每根杆件仅在其两端承受一对大小相等、方向相反的轴心作用力。5.2.3.2垂直荷载在竖向主框架中产生的支反力(1)使用工况:21
YF附着升降脚手架设计计算书共50页第22页GB3.958×8×900自重支反力:R=R===15.832(kN)SGXJGX2KS2×9000QB7.5×8×900施工荷载支反力:R=R===30(kN)SQXJQX2KS2×9000(2)升降工况:GB3.958×8×900自重支反力:R=R===23.748(kN)SGXJGX2JS2×6000/QCB1.25×8×900残留施工荷载支反力:R/=R/===7.5(kN)SQCXJQCX2JS2×6000(3)支反力的荷载组合:使用工况:R=0.9×[1.2R+0.9×1.4(R+R)]SXSGXSQXSWX=0.9×[1.2×15.832+0.9×1.4×(30−40.413)]=5.29(kN),R=0.9×[1.2R+0.9×1.4(R+R)]JXJGXJQXJWX=0.9×[1.2×15.832+0.9×1.4×(30−15.716)]=33.30(kN);升降工况:R=0.9×[1.2R+0.9×1.4(R+R)]SXSGXSQXSWX=0.9×[1.2×23.748+0.9×1.4×(7.5−35.437)]=−6.033(kN),R=0.9×[1.2R+0.9×1.4(R+R)]JXJGXJQXJWX=0.9×[1.2×23.748+0.9×1.4×(7.5−5.063)]=28.411(kN)。将上述计算结果汇总入表5—1。22
YF附着升降脚手架设计计算书共50页第23页表5—1各种荷载在水平梁架结构上产生的内力汇总(kN·m、kN)计算工况施工工况升降工况载荷MXAG、MXFG0支座自MXBG、MXEG-8.935弯矩重MXCG、MXDG-6.70立荷RZAG、RZFG14.714支座载RZBG、RZEG33.057反力面RZCG、RZDG31.385MXAQ、MXFQ00支座荷施MXBQ、MXEQ-16.932-2.822弯矩工MXCQ、MXDQ-12.696-2.116载荷RZAQ、RZFQ62.6464.647支座载RZBQ、RZEQ27.88210.441反力RZCQ、RZDQ59.4729.912MZAW、MZFW00构机位架水平MZBW、MZEW.-47.98-30.04总弯矩MZCW、MZDW-36.10-22.62风平RXAW、RXFW22.5114.09荷机位RXBW、RXEW64.6640.48水平载面反力RXCW、RXDW56.6235.45MYSW-4.852-5.044支座荷竖MYJW-4.034-6.133弯矩向MYKW00载主RXSW5.296.033框支座RXJW33.3028.411架反力RXKW5.8390注:(1)竖向主框架的轴向力在AB段下端的数值最大,即为表中支座反力,计算中取支座反力为轴向力。23
YF附着升降脚手架设计计算书共50页第24页5.3架体各部分的几何特性5.3.1杆件与构件截面的几何特性:(1)杆件(φ48×3.5钢管)π22π22A=(D−d)=−=(mm2截面积:(4841)489);44π44π445截面惯矩:I=(D−d)=(48−41)=1.219×10(mm4);646452I2×1.219×103抗弯模量:W===5079(mm);D485I1.219×10回转半径:r===15.8(mm)A489(2)结构1)水平梁架(φ48×3.5钢管,截面1.9m×0.9m)π22222截面积:ΣA=4×(D−d)=π(48−41)=1956(mm);425294截面惯矩:ΣI=n(I+Aa)=4×(1.219×10+489×950)=1.766×10(mm);XiiX25284ΣI=n(I+Aa)=4×(1.219×10+489×450)=3.966×10(mm);ZiiZ9ΣIX1.766×1063抗弯模量:ΣW===1.859×10(mm);Xa950X8ΣIZ3.966×1053ΣW===6.434×10(mm);Za450Z9ΣI1.766×10回转半径:Σr=X==950(mm)5XΣA19568ΣI3.966×10Σr=Z==450(mm)ZΣA19562)竖向主框架(2-φ48×3.5钢管+2-[6.3,中心距0.9m)π22π222截面积:ΣA=(D−d)+2×800=×(48−41)+2×1024=2537(mm);i4455264截面惯矩:ΣI=1.219×10+2×(1.66×10+1024×39.3)=3.605×10(mm),X526284ΣI=(1.219×10+489×450)+2(1.013×10+1024×450)=5.16×10(mm);Z6抗弯模量:ΣIX3.605×1053),ΣW===1.5×10(mmXa24X24
YF附着升降脚手架设计计算书共50页第25页8ΣIZ5.16×1063);ΣW===1.09×10(mmZa450+24Z5回转半径:ΣIX3.605×1012(mm),Σr===XΣA25378ΣIZ5.16×10451(mm)。Σr===ZΣA2538将杆件与构件截面尺寸代入上式计算,计算结果代入表5—2。5.3.2长细比与稳定系数:(1)单杆据参考文献[5]知,钢管杆件的单肢长细比为:ljμlλ==(5—21)irrii式中:μ—杆件两端的支承系数,各杆件两端固结,μ=0.5;将各杆件数据代入式(5—21)计算出单肢长细比,再于参考文献[4]中查取相应的稳定系数,代入表5—2。(2)单跨水平梁架lμl0.5×8000λ=X=Z==4.21(5—22)Xrr950XXlZμZl0.5×80008.89λ====(5—23)Zrr451ZZ单跨水平梁架的换算长细比为:2A24×489λ=λ+40=4.21+40×=9.89(5—24)XhXA2×48912A24×489λ=λ+40=8.89+40×=12.61(5—25)ZhZA2×48912式中:A—构件截面内主肢杆件横截面总面积,(mm);2A—构件截面所截斜缀杆横截面总面积,(mm);1(3)竖向主框架的长细比为:lZμZl1.13×1350033.82λ====Zrr451ZZ25
YF附着升降脚手架设计计算书共50页第26页竖向主框架的换算长细比为:2A22538λ=λ+40=33.82+40×=35.32ZhZA2×4891将杆件、水平梁架、竖向主框架几何特性计算结果在参考文献[4]中查取稳定系数,代入表5—2汇总。表5—2水平梁架与竖向主框架的几何特性与长细比参数数截面积抗弯模量截面惯矩回转半径支承长度计算长度长细比换算长细稳定系材型234构件名称量A(mm)WX(mm)IX(mm)rX(mm)系数L(mm)lj(mm)λ比λh数φ立杆12190095060.12/0.8410.5定单纵向杆φ4810160080050.63/0.8865型×3.548950791.219×1015.80杆横向杆121.090090056.96/0.856水平斜杆100.52484124278.61/0.740梁691.766×101.289×109504.219.890.995架结构件整体119560.580004000596.434×102.895×104508.8912.610.992内立杆2190095060.12/0.841φ485横杆248950791.219×1015.800.590045028.48/0.962定单×3.5型斜杆22102105166.52/0.808竖肢向2[62.53×10410.13×105外立杆210240.740028033.8235.350.942主.3455.79×101.66×10框56架1.5×103.61×10120.5190095060.13/0.841结构件整体32538681..09×105.16×104511.06000600013.3333.280.9925.4架体定型框架的校核计算竖向主框架上承受的载荷为均布荷载,其支座内力见表5—1。5.4.1荷载组合方法γ[γG+γQ]≤R(5—30)0GKQkγ[γG+0.9γ(Q+W)]≤R(5—31)0GkQkk式中:γ—结构重要性系数,脚手架为临时设施,可取γ=0.9;00γG—恒载分项系数,据参考文献[3],取γG=1.2;γQ—活载分项系数,据参考文献[3],取γQ=1.4;26
YF附着升降脚手架设计计算书共50页第27页G—架体恒载,包括架体结构材料、防护材料、作业层设施、随架k体上升的设备的自重;Q—架体上的活载,包括施工人员、施工材料、施工机具的自重;kW—架体承受的水平风载,各种工况中的数值可由表5—2数值计算。k5.4.2定型水平梁架的强度、稳定性与刚度校核计算(1)计算方法与计算工况用节点法计算各工况中各杆件的轴向力。图5—1水平梁架的计算力学模型的结构图见图5—6,杆件的几何特性见表5—2。为简化计算,从施工工况等跨等截面五跨连续梁中取出弯矩与支反力较大的B–C跨进行计算,该段梁的受力图见图5—7(a)。(2)杆件轴向力计算:各节点的计算图见图5—7(b),在施工工况中B—C段梁端的荷载组合为:M=0.9×[1.2×(−8.935)+1.4×(−16.932)]=−30.98(kN⋅m),XBM=0.9×[1.2×(−6.7)+1.4×(−12.696)]=−23.23(kN⋅m),XCR=0.9×(1.2×33.057+1.4×27.882)=70.84(kN)ZBR=0.9×(1.2×31.385+1.4×59.472)=108.84(kN)ZCF=0.9×[1.2×(−31.664)+1.4×(−60)]=−109.80(kN),Z0.5FZ0.5×(−109.80)P===−9.15(kN)=Pba660.5MXB0.5×30.980.5MXC0.5×23.23P===8.15(kN),P===6.11(kN)VGBVGCh1.9h1.9在上述荷载的作用下,梁中各杆件的轴向力计算如下:①节点7:本段梁外片桁架端部主弦杆上的轴向力为:ΣX=0,N−P=0N=8.15(kN)(压)i7-8VGB7-8ΣY=0,0.5×0.5R-N=0N=0.25×70.84=17.71(kN)(压)iZB6-76-7②节点6:ΣY=0,N−P−Nsinα=0,i6-7b8-627
YF附着升降脚手架设计计算书共50页第28页N6−7−Pb17.71−9.15N8-6==ο=11.17(kN)(拉)sinαsin50ΣX=0,P−N−Ncosα=0iVGB5-68-6οN5-6=PVGB−N8-6cosα=8.15−11.17×cos50=0.97(kN)(拉)③节点5:ΣX=0,N−N=0N=N=0.97(kN)(拉),i6-54−54-56−5ΣY=0,-P-N=0N=P=−9.15(kN)(压)ia8-58-5a④节点8:ΣY=0,Nsinα−N+Nsinα=0,i6-85-84−8οN=(N−Nsinα)/sinα=(9.15/sin50−11.17)=0.77(kN)(拉),4-85−86-828
YF附着升降脚手架设计计算书共50页第29页图5—6架体水平梁架结构简图(a)B—C段段水平梁架结构受力图MbhMbh(b)B—C段水平梁架节点受力图图5—7架体水平梁架B—C段杆件轴向力计算图29
YF附着升降脚手架设计计算书共50页第30页ΣX=0,N-Ncosα−N+Ncosα=0,i7-86-89-84-8οοN=8.15−11.17cos50+0.77cos50=−0.575(kN)(拉)9-8⑤节点4:ΣY=0,N−Nsinα−P−Nsinα=0,i9-48−4a10−4οN=(N−P−Nsinα)/sinα=0−9.15/sin50−0.77=−12.71(kN)(压),4-109−4a8-4ΣX=0,N+Ncosα−N+Ncosα=0,i5-48-43-410-4οοN=0.97+0.77cos50+12.71cos50=9.63(kN)(拉)3-4⑥节点10:ΣY=0,Nsinα−N=0,i4−103−10οN=Nsinα=−12.71sin50=−9.74(kN)(拉),3-104-10ΣX=0,N+Ncosα−N=0,i11-104-109-10οN=−0.575+12.71cos50=7.59(kN)(压)10-11⑦节点3:ΣY=0,Nsinα−N=0,i3−113−10οN=N/sinα=13.4/sin50=17.49(kN)(拉),3-113-10ΣX=0,N-Ncosα−N=0,i4-33-113-2οN=9.63−17.49cos50=−1.61(kN)(压)3-2⑧节点:11:ΣY=0,Nsinα+Nsinα−N=0,i3−111−112−11οN=N/sinα−N=9.15/sin50−17.49=−5.55(kN)(压),1-112-113−11ΣX=0,Ncosα-N-Ncosα+N=0,i3-1110-111-1112-11οοN=17.49−7.59/cos50+6.11/cos50=15.19(kN)(拉)1-11⑨节点12:ΣY=0,−0.5×0.5R−N=0,N=−0.25R=0.25×108.84=27.21(kN)(压)iC12-112-1C将以上各杆件的计算轴向力代入表5—3。30
YF附着升降脚手架设计计算书共50页第31页表5—3架体水平梁架B—C跨梁杆件强度与稳定性计算杆件稳定稳定计杆件拉焊缝抗焊缝剪拉压焊缝剪杆件轴向力系数算应力应力剪面积切应力强度f切强度备注代号NiϕσσΣAIτστf222222(N)(N/mm)(N/mm)(mm)(N/mm)(N/mm)(N/mm)1–2-16100.886-4/4244215124弦杆1–1115190//3167423″″斜腹杆1-12*-272100.841-66///″″立杆2–3-16100.886-4/424-4″″弦杆2–11-91500.841-22///″″立杆3–4*-96300.886-22/424-23″″弦杆3–10-97400.841-24///″″立杆3–11*17490//3667426″″斜腹杆4–5970//24241″″弦杆4–8770//26741″″斜腹杆4–90//0//″″立杆4–10*-127100.74-35/674-19″″斜腹杆5–6970//24241″″弦杆5–89150//18//″″立杆6–7*-177100.841-43///″″立杆6–811170//2367426″″斜腹杆7–8-81500.886-1916424-19″″弦杆8–9575//14241″″弦杆9–10575//14241″″弦杆10–11-75900.886-18/424-20″″弦杆11–12-61100.886-14/424-14″″弦杆注:①轴力负号为压力;②加*数字为该类杆最大压力或拉力;③焊缝高度5mm。(3)杆件的抗压稳定性与抗拉强度计算1)抗压稳定性:杆件的抗压稳定性计算公式见式(5—32),杆件单肢长细比λ见表5—2,31
YF附着升降脚手架设计计算书共50页第32页计算结果代入表5—4。NYσ=
您可能关注的文档
- 换热计算书(蒸发器)
- 手拉行车计算书1.0t -
- 次干道结构(交通量仅次于主干道)方案1计算书
- 水工钢筋混凝土课程设计计算书
- 某市政跨河满堂支架现浇连续梁施工方案(含计算书)
- 土木工程专业毕业设计计算书--昆明市某小学教学楼
- 某文化活动中心 毕业设计(框架)计算书
- thjw20000.5-jxw变频调速(无机房)载货电梯设计计算书
- 工程计算表格及工具u型槽的计算书
- 建筑施工临时支撑结构技术规范jgj300-2013计算书样本-有剪刀撑
- 一区地下车库计算书
- 40mt梁架桥机计算书
- 16米钢筋混凝土t 梁设计计算书
- 25米现浇箱梁支架系统计算书
- cfg桩法地基处理计算书21
- 25m空心板梁钢绞线伸长量计算书
- t型梁桥设计计算书
- t梁预应力钢绞线的理论伸长量计算书1
相关文档
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看