


- 264.38 KB
- 4页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
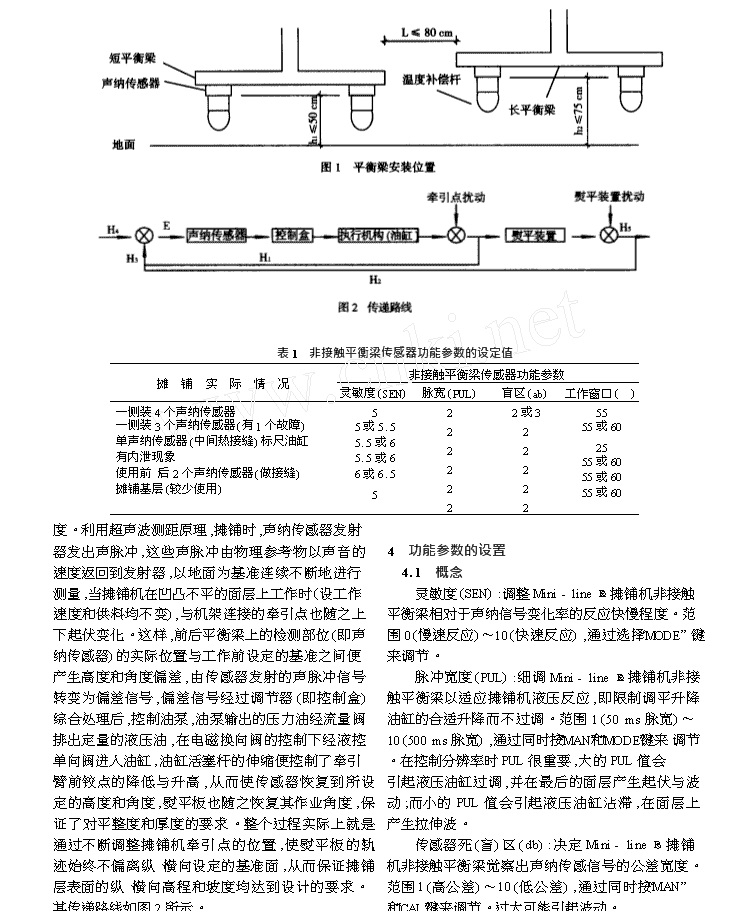
'Mini-line○摊铺机非接触平衡梁在路面施工中的应用刘明宇,李晓锋(广东长大公路工程有限公司第三分公司,广东番禺511431)要:简要介绍了丹麦TFMini-lineR○摊铺机非接触平衡梁的结构组成、工作原理和安装调整,重点讨摘论其在沥青面层以及稳定土层施工中不同情况下使用的功能参数调节和故障的诊断及排除,可供使用者参考。关键词:摊铺机;非接触平衡梁;路面施工;应用文章编号:1009-6477(2005)03-0069-03中图分类号:U415.52+1文献标识码:ApplicationofNon-confactBalanceBeamofMini-linePavertoPavementConstructionLIUMing2yu,LIXiao2feng平整度是高等级路面重要的质量检验评定指标之一,影响因素多,施工控制难度大,施工中的每个环节都与它有密切的关系。摊铺机熨平板作为路面成型的最终设备部分,它的稳定性直接影响到路面的平整度。而熨平板要稳定可靠地工作,必须有一个准确的基准。在工程施工中有2种基准可供选择:一种是固定基准,即用钢丝架设的基准线;另一种是移动基准,即用摊铺机悬挂的平衡梁以移动的地表面作基准。由于平衡梁可以避免固定基准的折线和人为误差的影响而大大提高路面的平整度,已被广泛应用于路面施工中,特别是沥青面层的施工。平衡梁有接触式和非接触式2种,由于接触式平衡梁前面大滑靴在遇到障碍物,如粗状石粒、桥面钢筋等时,容易损坏及变形,后面滑轮粘滞沥青混合料造成离析带的现象也经常发生,再加上接触式平衡梁的拆装和转场搬迁不方便,正逐渐地被非接触式平衡梁所代替。我公司采用丹麦Mini-line○R摊铺机非接触式平衡梁在开(平)阳(江)高速、京珠南高速北兴段、广(州)清(远)高速等工地的实际使用证明,摊铺沥青路面可达到较为理想的平整度,满足《公路工程质量检验评定标准》中对沥青混凝土面层平整度的要求。Mini-line○R摊铺机非接触平衡梁传感控制部分分左右两侧,每侧部件含HS300控制盒1个、3叉电缆1根、G200声纳传感器4个、平衡梁之间连接电缆1根,需注意的是每侧安装的4个声纳传感器必须带4种不同颜色标记,分别为红、黄、蓝、白,不能混淆。安装结构件包括:大臂焊接件4块,├杆8根、直杆4根、长短平衡梁各2组、挡圈14个、声纳基座8只、基座加长杆4只。2安装调整首先在熨平板下面垫1块5cm左右的木块,调节仰角至正常工作位置,关闭摊铺机总电源,并拆除行走和电脑电缆线,在左右侧大臂的前方分别焊接1块大臂焊接块,焊接位置以不影响其它结构件工作为宜,其次将短平衡梁装至摊铺机前方的大臂焊接件上,长平衡梁以跨越熨平板的形式装至摊铺机后方的大臂焊接件上,将基座装到平衡梁上,调整平衡梁上下位置使基座离地面尺寸至合适,太高,影响感应效果,太低,干扰大,以装好声纳传感器的平衡梁为例,其合适位置尺寸如图1。3工作原理摊铺机自动找平装置是1个机、电、液一体化的控制系统。工作前,先设定1个基准面,即通常所说的平衡梁传感器调零,此时熨平板有一原始工作角1结构组成
表1非接触平衡梁传感器功能参数的设定值非接触平衡梁传感器功能参数摊铺实际情况灵敏度(SEN)脉宽(PUL)盲区(ab)工作窗口()一侧装4个声纳传感器一侧装3个声纳传感器(有1个故障)单声纳传感器(中间热接缝)标尺油缸有内泄现象使用前、后2个声纳传感器(做接缝)摊铺基层(较少使用)55或5.55.5或65.5或66或6.552222222或3222225555或602555或6055或6055或60度。利用超声波测距原理,摊铺时,声纳传感器发射器发出声脉冲,这些声脉冲由物理参考物以声音的速度返回到发射器,以地面为基准连续不断地进行测量,当摊铺机在凹凸不平的面层上工作时(设工作速度和供料均不变),与机架连接的牵引点也随之上下起伏变化。这样,前后平衡梁上的检测部位(即声纳传感器)的实际位置与工作前设定的基准之间便产生高度和角度偏差,由传感器发射的声脉冲信号转变为偏差信号,偏差信号经过调节器(即控制盒)综合处理后,控制油泵,油泵输出的压力油经流量阀排出定量的液压油,在电磁换向阀的控制下经液控单向阀进入油缸,油缸活塞杆的伸缩便控制了牵引臂前铰点的降低与升高,从而使传感器恢复到所设定的高度和角度,熨平板也随之恢复其作业角度,保证了对平整度和厚度的要求。整个过程实际上就是通过不断调整摊铺机牵引点的位置,使熨平板的轨迹始终不偏离纵、横向设定的基准面,从而保证摊铺层表面的纵、横向高程和坡度均达到设计的要求。其传递路线如图2所示。功能参数的设置4.1概念灵敏度(SEN):调整Mini-line○R摊铺机非接触平衡梁相对于声纳信号变化率的反应快慢程度。范围0(慢速反应)~10(快速反应),通过选择“MODE”键来调节。脉冲宽度(PUL):细调Mini-line○R摊铺机非接触平衡梁以适应摊铺机液压反应,即限制调平升降油缸的合适升降而不过调。范围1(50ms脉宽)~10(500ms脉宽),通过同时按“MAN”和“MODE”键来调节。在控制分辨率时PUL很重要,大的PUL值会引起液压油缸过调,并在最后的面层产生起伏与波动;而小的PUL值会引起液压油缸沾滞,在面层上产生拉伸波。传感器死(盲)区(db):决定Mini-line○R摊铺机非接触平衡梁觉察出声纳传感信号的公差宽度。范围1(高公差)~10(低公差),通过同时按“MAN”和“CAL”键来调节。过大可能引起波动。4
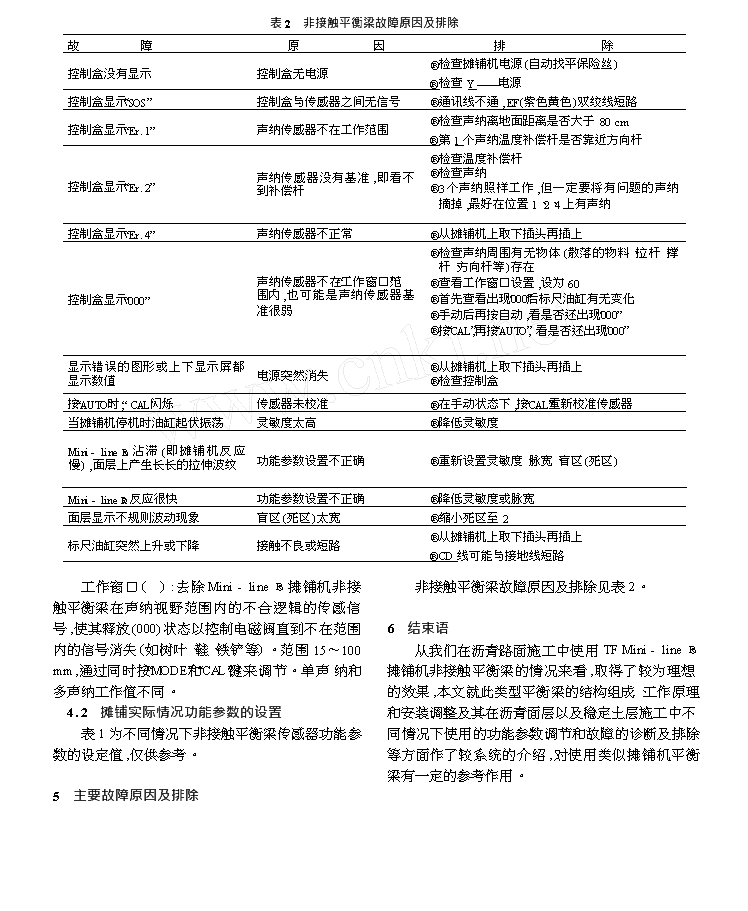
表2非接触平衡梁故障原因及排除故障原因排除®检查摊铺机电源(自动找平保险丝)控制盒没有显示控制盒无电源®检查Y———电源控制盒显示“SOS”控制盒与传感器之间无信号®通讯线不通,EF(紫色黄色)双绞线短路®检查声纳离地面距离是否大于80cm控制盒显示“Er.1”声纳传感器不在工作范围®第1个声纳温度补偿杆是否靠近方向杆®检查温度补偿杆®检查声纳®3个声纳照样工作,但一定要将有问题的声纳摘掉,最好在位置1、2、4上有声纳声纳传感器没有基准,即看不到补偿杆控制盒显示“Er.2”控制盒显示“Er.4”声纳传感器不正常®从摊铺机上取下插头再插上®检查声纳周围有无物体(散落的物料、拉杆、撑杆、方向杆等)存在®查看工作窗口设置,设为60®首先查看出现“000”后标尺油缸有无变化®手动后再按自动,看是否还出现“000”®按“CAL”,再按“AUTO”,看是否还出现“000”声纳传感器不在“工作窗口”范围内,也可能是声纳传感器基准很弱控制盒显示“000”显示错误的图形或上下显示屏都显示数值®从摊铺机上取下插头再插上®检查控制盒电源突然消失按“AUTO”时“,CAL”闪烁传感器未校准®在手动状态下,按“CAL”重新校准传感器当摊铺机停机时油缸起伏振荡灵敏度太高®降低灵敏度Mini-line○R沾滞(即摊铺机反应慢),面层上产生长长的拉伸波纹功能参数设置不正确®重新设置灵敏度、脉宽、盲区(死区)Mini-line○R反应很快功能参数设置不正确®降低灵敏度或脉宽面层显示不规则波动现象盲区(死区)太宽®缩小死区至2®从摊铺机上取下插头再插上标尺油缸突然上升或下降接触不良或短路®CD线可能与接地线短路工作窗口():去除Mini-line○R摊铺机非接触平衡梁在声纳视野范围内的不合逻辑的传感信号,使其释放(000)状态以控制电磁阀直到不在范围内的信号消失(如树叶、鞋、铁铲等)。范围15~100mm,通过同时按“MODE”和“CAL”键来调节。单声纳和多声纳工作值不同。4.2摊铺实际情况功能参数的设置表1为不同情况下非接触平衡梁传感器功能参数的设定值,仅供参考。非接触平衡梁故障原因及排除见表2。6结束语从我们在沥青路面施工中使用TFMini-line○R摊铺机非接触平衡梁的情况来看,取得了较为理想的效果,本文就此类型平衡梁的结构组成、工作原理和安装调整及其在沥青面层以及稳定土层施工中不同情况下使用的功能参数调节和故障的诊断及排除等方面作了较系统的介绍,对使用类似摊铺机平衡梁有一定的参考作用。5主要故障原因及排除
file:///D|/新建MicrosoftWord文档.txtdf机及ov及ojxlkvjlkxcmvkmxclkjlk;jsdfljklem,.xmv/.,mzxlkjvolfdjiojvkldffile:///D|/新建MicrosoftWord文档.txt2012/8/216:09:56'