


- 456.89 KB
- 11页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'电力行业标准《架空输电线路机器人巡检系统通用技术条件》编制说明1任务来源及工作过程本标准根据国家能源局达的2016年能源领域行业标准制(修)订计划(国能科技【2016】238号文件)要求制定。2016年11月,全国架空线路标准化技术委员会线路运行分技术委员会秘书处在广州组织召开了《架空输电线路机器人巡检系统通用技术条件》电力行业标准起草小组启动会议。广东电网有限责任公司电力科学研究院、中国电力科学研究院、武汉大学、国网湖北省电力公司、国网吉林省电力公司、山东鲁能智能技术有限公司、广东科凯达智能机器人有限公司和标委会秘书处有关人员参加了会议。广东电网有限责任公司电力科学研究院汇报了标准编制提纲及标准草稿,会议讨论了标准编制提纲及草稿,并对下阶段标准编写工作进行部署。2017年1月,第五届全国架空线路标准化技术委员会成立大会暨2016年工作会议在北京召开,标准主要编写单位广东电网有限责任公司电力科学研究院、中国电力科学研究院、武汉大学参加了会议。会上对《架空输电线路机器人巡检系统通用技术条件》初稿进行了审查,提出了修改建议。2017年4月,全国架空线路标准化技术委员会线路运行分技术委员会秘书处在广州组织召开了《架空输电线路机器人巡检系统通用技术条件》行业标准讨论稿研讨会议。会上对标准讨论稿进行了认真的讨论,提出了《架空输电线路机器人巡检系统通用技术条件》征求意见稿。2编制原则和主要内容2.1编制原则编写该标准遵循与相关标准协调一致的原则,与设计规范和运行规程方面的相关标准没有矛盾。本标准是在充分总结、吸取我国输电线路人工巡检和输电线路运行维护经验的基础上,并结合我国架空输电线路机器人巡检系统技术研发和实际应用经验而制定的。
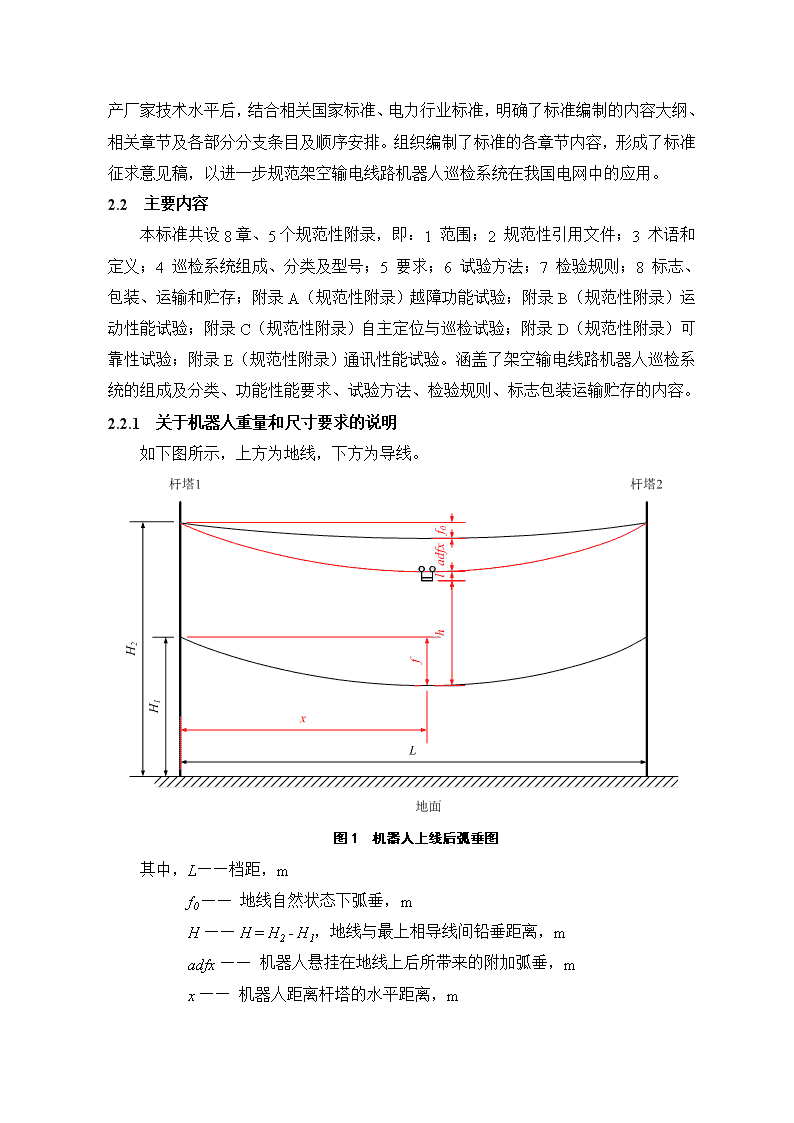
编写组在收集整理了相关基层单位架空输电线路机器人巡检系统应用情况和生产厂家技术水平后,结合相关国家标准、电力行业标准,明确了标准编制的内容大纲、相关章节及各部分分支条目及顺序安排。组织编制了标准的各章节内容,形成了标准征求意见稿,以进一步规范架空输电线路机器人巡检系统在我国电网中的应用。2.2主要内容本标准共设8章、5个规范性附录,即:1范围;2规范性引用文件;3术语和定义;4巡检系统组成、分类及型号;5要求;6试验方法;7检验规则;8标志、包装、运输和贮存;附录A(规范性附录)越障功能试验;附录B(规范性附录)运动性能试验;附录C(规范性附录)自主定位与巡检试验;附录D(规范性附录)可靠性试验;附录E(规范性附录)通讯性能试验。涵盖了架空输电线路机器人巡检系统的组成及分类、功能性能要求、试验方法、检验规则、标志包装运输贮存的内容。2.2.1关于机器人重量和尺寸要求的说明如下图所示,上方为地线,下方为导线。图1机器人上线后弧垂图其中,L——档距,mf0——地线自然状态下弧垂,mH——H=H2-H1,地线与最上相导线间铅垂距离,madfx——机器人悬挂在地线上后所带来的附加弧垂,mx——机器人距离杆塔的水平距离,m
l——机器人竖直高度,m为了保证机器人悬挂在地线上后,地线与最上相导线间的距离满足相应电压等级的导线净空距离,即h=H-l-adfx-f0+f需大于下图中相应电压等级的导线所对应的h。经计算,当机器人上线后当处于档距中央时候,地线与导线间距离最小。图2确定地线与导线间最大铅垂距离其中,R——相应电压等级的净空距离,mX——相应杆塔所对应地线与导线间的水平距离,mH——相应杆塔所对应地线与导线间的铅垂距离,m导线弧垂f为(1)其中,(2)式中:la——架空线最低点对较高悬挂点A的水平距离(惯称较高悬挂点A侧的平视档距),mh——两悬挂点高差,mx——架空线任一点P至坐标原点A的水平距离,mH——架空线的水平张力,Nw——架空线单位长度的自重力,N/ml——线档的档距,m机器人悬挂在地线上产生的总弧垂fx为
(3)其中,Q——集中荷载,N(此处机器人重量为110kg)a——集中荷载距离低悬挂点的距离,m其中,fx=adfx+f01)500kv线路可悬挂最大机器人重量经过对大量500kV线路杆塔塔型的对比研究发现,对于直线塔,地线与最上相导线间水平距离最小值Xmin=1.5m,垂直距离最小值Ymin=3m,且对应的导线型号为LGJ-300/25,截面积S=333.31mm2,直径D=23.76mm,破断拉力F=83410N,单位长度自重力为w=10.58N/m,地线为GJ-70,S=72.19mm2,D=11mm,F=84950N,w=5.799N/m;对于耐张塔,Xmin=0.5m,Ymin=5.5m,对应导线型号为LGJQ-300,S=335mm2,D=23.70mm,F=84570N,w=11.16N/m,地线型号为GJ-70。表1110kV~500kV带电部分与杆构件的最小间隙(单位为m)标称电压(kV)110220330500工频电压0.250.550.901.201.30操作过电压0.701.451.952.502.70雷电过电压1.001.92.303.303.30注:1按雷电过电压和操作过电压情况校验间隙时的相应气象条件,参见《110~750kV架空输电线路设计规范》(GB50545—2010)标准附录A。2按运行电压情况校验间隙时风速采用基本风速修正至相应导线平均高度处的值及相应气温。3500kV空气间隙栏,左侧数据适合于海拔高度不超过500m地区;右侧是用于超过500m但不超过1000m的地区。注:(《110~750kV架空输电线路设计规范》(GB50545—2010))表2操作过电压及雷电过电压要求悬垂绝缘子串的最少片数标称电压(kV)110220330500750单片绝缘子的高度(mm)146146146155170绝缘子片数(片)713172532
为保持高塔的耐雷性能,全高超过40m有地线的杆塔,高度每增加10m,应比表2.2增加1片相当于高度146mm的绝缘子,全高超过100m的杆塔,绝缘子片数应根据运行经验结合计算确定。由于高杆塔而增加绝缘子片数时,雷电过电压最小间隙也相应增大;750kV杆塔全高超过40m时,可根据实际情况进行验算,确定是否需要增加绝缘子和间隙。注:(《110~750kV架空输电线路设计规范》(GB50545—2010))对于直线塔,图2中X=1.5m,R=3.3m,(R为表2.1中相应电压等级的雷电过电压的最小间隙)由图解法可得h=2.9m。故h=H-l-adfx-f0+f>2.9,其中,H=Ymin+0.155×(25+2)=7.2m(直线塔绝缘子串竖直,故需加绝缘子串的高度)。adfx+f0-f<4.3-l,即fx-f<4.3-l,当l分别取0.5m,1m,1.5m时候,fx-f<3.8m,fx-f<3.3m,fx-f<2.8m。对于耐张塔,图2中X=1.5m,R=3.3m,由图解法可得h=2.9m。故h=H-l-adfx-f0+f>2.9,其中,H=Ymin=5.5m。adfx+f0-f<2.6-l,即fx-f<2.6-l,当l分别取0.5m,1m,1.5m时候,fx-f<2.1m,fx-f<1.6m,fx-f<1.1m。分别利用公式(1)和(3)可得表3。表3500kV线路允许悬挂机器人最大重量 档距(m) 质量(kg)机器人高度(m)直线塔耐张塔200400600800100020040060080010000.517516019023027512513817522027011601551852252731081291702172671.514014518022027091121165213263注:高差取0~100m2)220kv线路可悬挂最大机器人重量经过对大量220kV线路杆塔塔型的对比研究发现,对于直线塔,地线与最上相导线间水平距离最小值Xmin=1m,垂直距离最小值Ymin=3m,且对应的导线型号为LGJQ-300,截面积S=335.0mm2,D=23.7mm,F=84570N,w=11.16N/m,地线为GJ-50,S=49.5mm2,D=9mm,F=53500N,w=4N/m;对于耐张塔,Xmin=1.2m,Ymin=4.5m,对应导线型号为LGJQ-300(1),S=335.0mm2,D=23.7mm,F=84570N,w=11.16N/m,地线型号为LGJ-70/40,S=110.4mm2,D=13.6mm,F=58300N,w=5.11N/m。
对于直线塔,图2中X=1m,R=1.9m(R为表2.1中相应电压等级的雷电过电压的最小间隙),由图解法可得h=1.6m。故h=H-l-adfx-f0+f>1.6,其中,H=Ymin+0.146×(13+2)=5.2m(直线塔绝缘子串竖直,故需加绝缘子串的高度)。Adfx+f0-f<2.3-l,即fx-f<3.6-l,当l分别取0.5m,1m,1.5m时候,fx-f<3.1m,fx-f<2.6m,fx-f<2.1m。对于耐张塔,图2中X=1.2m,R=4.5m,由图解法可得h=1.5m。故h=H-l-adfx-f0+f>1.5,其中,H=Ymin=4.5m。adfx+f0-f<3-l,即fx-f<3-l,当l分别取0.5m,1m,1.5m时候,fx-f<2.5m,fx-f<2m,fx-f<1.5m。分别利用公式(1)和(3)可得表4。表4220kV线路允许悬挂机器人最大重量 档距(m) 质量(kg)机器人高度(m)直线塔耐张塔200400600800100020040060080010000.59996116142170868298120145188911121391667576941171421.57886108136166627190114139(备注:高差取0~100m)3)110kv线路可悬挂最大机器人重量经过对大量110kV线路杆塔塔型的对比研究发现,对于直线塔,地线与最上相导线间水平距离最小值Xmin=0.9m,垂直距离最小值Ymin=1.5m,且对应的导线型号为LGJ-185,截面积S=277.83mm2,直径D=19.6mm,破断拉力F=80190N,单位长度自重力为w=8.48N/m,地线为GJ-35,S=37.2mm2,D=7.8mm,F=40180N,w=3N/m;对于耐张塔,Xmin=0.2m,Ymin=3m,对应导线型号为LGJ-240,S=297.57mm2,D=22.4mm,F=102100N,w=11.08N/m,地线型号为GJ-50,S=49.5mm2,D=9mm,F=53500N,w=4N/m。对于直线塔,图2中X=0.9m,R=1m(R为表2.1中相应电压等级的雷电过电压的最小间隙),由图解法可得h=0.4m。故h=H-l-adfx-f0+f>0.4,其中,H=Ymin+0.146×(7+2)=2.8m(直线塔绝缘子串竖直,故需加绝缘子串的高度)。adfx+f0-f
<2.4-l,即fx-f<2.4-l,当l分别取0.5m,1m,1.5m时候,fx-f<1.9m,fx-f<1.4m,fx-f<0.9m。对于耐张塔,图2中X=0.2m,R=1m,由图解法可得h=1m。故h=H-l-adfx-f0+f>2.9,其中,H=Ymin=3m。adfx+f0-f<2.6-l,即fx-f<2.6-l,当l分别取0.5m,1m,1.5m时候,fx-f<2.1m,fx-f<1.6m,fx-f<1.1m。分别利用公式(1)和(3)可得表5。表5110kV线路允许悬挂机器人最大重量 档距(m) 质量(kg)机器人高度(m)直线塔耐张塔200400600800100020040060080010000.5758510813616681881101371671657910413316371821061341641.554731011301615976102132162(备注:高差取0~100m)4)结论因为在一条连续档线路必然既有直线塔又有耐张塔,故对于相应电压等级线路所允许悬挂机器人最大重量需取直线塔与耐张塔中较小值。结合表3~5可得表6。表6不同电压、不同机器人高度时机器人的最大重量 机器人高度m 电压等级kV1102205000.58085125170751051.5606090综合架空输电线路机器人本体目前主要高度尺寸均处于1m-1.5m范围,现提出机器人重量和尺寸要求如表7。表7架空输电线路机器人重量和尺寸要求序号线路电压等级kV最大高度mm最大重量kg166、110900602220、3301000703500及以上1100902.2.2关于不同档距、高差下的坡度值说明
根据高压架空输电线路施工技术手册(第三版,中国电力出版社)第一章第十一节1.2计算公式:(3)(4)其中,θA,θB分别为线路两悬挂点处的倾斜角l——档距,mw——架空线单位长度的自重力,N/mH——架空线的水平张力,Nh——线路两端悬挂点高差,m以GJ-50为例,w=3.85N/m(重力加速度g取10m/s2),破断拉力F=55260N,则H=11052N(取最大张力的1/5)则带入公式(3)和(4)即可计算的θA和θB。如表8所示。表8不同档距下的线路坡度不同档距下,A,B两悬挂点处倾斜角(h=0)档距400500600700800900100011001200130014001500θA/°3.994.985.986.977.968.959.9310.9111.8912.8613.8414.80θB/°3.994.985.986.977.968.959.9310.9111.8912.8613.8414.80当考虑高差后则,倾斜角如表9表10所示档距表9不同档距及高差下线路倾斜角θA倾斜角高差10020030040050060070080090010001100120013001400150001.02.03.04.05.06.07.08.09.010.011.012.012.913.814.8106.74.94.95.46.16.97.88.79.610.511.412.413.314.215.22012.37.76.86.87.37.98.69.410.211.111.912.813.714.615.53017.710.58.78.38.48.89.410.110.811.612.413.314.115.015.94022.713.310.69.79.59.810.210.811.412.212.913.714.615.416.35027.516.012.411.110.610.711.011.512.112.713.414.215.015.816.66031.818.614.212.511.811.611.812.212.713.313.914.715.416.217.07035.821.216.013.812.912.512.612.913.313.814.415.115.816.617.38039.423.617.815.214.013.513.413.614.014.415.015.616.317.017.79042.726.019.516.515.114.414.214.314.514.915.416.016.717.318.110045.728.321.217.916.115.315.014.915.115.515.916.517.117.718.4110—30.522.919.117.216.215.715.615.716.016.416.917.518.118.8120—32.724.520.518.317.116.516.316.316.617.017.417.918.519.1
130—34.726.121.719.318.017.317.016.917.117.417.818.318.919.5140—36.627.723.020.418.918.017.617.517.717.918.318.719.319.8150—38.429.224.221.419.718.818.318.118.218.418.719.219.620.2表10不同档距及高差下线路倾斜角θB档距倾斜角高差10020030040050060070080090010001100120013001400150001.02.03.04.05.06.06.28.09.09.910.911.912.913.814.8104.70.91.02.63.85.06.27.38.39.410.411.412.413.414.42010.33.70.81.12.74.15.46.57.78.89.911.012.013.114.13015.76.62.70.31.63.14.55.87.18.29.410.511.612.713.74020.99.34.61.70.42.23.75.16.47.78.910.011.212.313.35025.712.16.53.10.71.22.94.45.87.18.49.310.711.913.06030.114.88.44.61.90.32.13.75.26.67.99.110.311.512.67034.217.410.26.03.00.71.33.04.56.07.48.69.911.112.28037.919.912.07.44.11.60.52.33.95.46.88.29.410.711.99041.222.413.88.85.32.60.31.63.34.96.37.79.010.311.510044.324.815.610.16.43.51.20.92.74.35.87.28.69.911.1110—27.017.311.57.54.42.00.22.03.75.36.88.19.510.8120—29.219.012.88.65.42.80.61.43.24.86.37.79.110.4130—31.320.614.29.76.33.61.30.82.64.35.87.38.710.0140—33.322.315.510.87.24.42.00.12.03.85.46.98.39.6150—35.323.916.811.88.15.22.70.51.53.24.96.47.99.3综合以上数据分析,多数情况下机器人爬坡能力达到30°可满足正常巡检要求。2.2.3关于机器人抗风能力要求说明建立风载荷下巡检机器人受力模型,如图3,机器人受到风载荷F可以分解为:横向风力Fx,升力Fy,平行于机器人行驶速度v’方向的风力Fz。Fz与v’同向或逆向,主要影响机器人的速度与加速度大小;横向风力Fx,升力Fy引起机器人两个方向的扰动:以线路为轴线的左右横向摆动和上下振动,且呈现一定的周期性。已知机器人总质量m=45.0kg,在不考虑地线舞动的情况下,非极端风速下由风载荷引起的升力Fy远小于机器人自重,对机器人姿态影响较小,在此不对其重点研究。
图3风载荷下巡检机器人受力模型横向风力Fx对巡检机器人的运行作业影响最大,计算横向风力Fx采用如下公式:Fx=0.5×ραKKhAv2(5)式中:ρ——空气密度,标准值为1.226kg/m3;α——风速不均匀系数;K——空气动力系数;Kh——高空风速增大系数;A——受风投影面积,m2;v——风速,m/s;在距离地面60m的野外环境中,高空风速增大系数取Kh=1.71,空气动力学系数K=1.5,风速不均匀系数α=0.85,为了计算机器人行驶过程中不同风向下风力对机器人最大影响,风速v取地面最大风速值,化简式(5)得:Fx=1.336Av2(6)取巡检机器人横向面积A=0.7×0.3=0.21m2,在风力等级为六级、八级,风速v=14m/s、v=20m/s情况下,横向风力分别为Fx=54.990N、Fx=112.224N,机器人质量取50kg,机器人重心在Fx作用下沿地线为轴心的静态偏转角分别为:,(7)由于阵风效应的存在,巡检机器人姿态表现为以地线为轴线的横向类似周期性摆动,对机器人运行影响主要在穿越杆塔过障与定点巡检两个方面。为提高过障效率,巡检机器人在穿越悬垂线夹和耐张塔头过程中控制系统优先选用滚动越障方式,双臂压紧轮完全松开将会使行走轮与地线道路之间的摩擦系数显著减小,横向风力下机器人摆角值增大至某一定值后,行走轮边缘会与上述金具相接触,
继续行走可能导致行走轮脱离地线道路。机器人巡检作业过程中,若摆动频率值过大将使两侧云摄像机对焦困难,造成巡检图像模糊,产生大量无效照片导致巡检作业失败。综合以上考虑,选取机器人巡检时抗风能力宜选取为六级风速,抗大风能力宜选取为八级至九级风速(20m/s)。3目的及意义3.1目的架空输电线路机器人巡检系统实现了沿地线行走、搭载不同任务检测设备、对输电线路设备和通道环境进行自动巡检功能,可提高架空输电线路巡视效率,显著降低线路运维成本。但目前行业标准体系中尚缺乏关于架空输电线路机器人巡检系统的技术条件类规范,在机器人定型选型、试验检验等方面缺乏依据。因此,有必要制订《架空输电线路机器人巡检系统通用技术条件》,对机器人巡检系统的组成与分类、功能与性能要求、试验方法、检验规则方法等内容进行规范。3.2意义通过《架空输电线路机器人巡检系统通用技术条件》的制定,可以有效规范并指导机器人生产厂家的设计、研发、生产过程,明确产品基本功能需求和改进优化方向,有效降低企业成本。标准亦规范了机器人在型式试验、出厂和验收等各质量控制环节所需采用的方法和评判标准,使机器人厂家和用户开展试验和检验工作时有据可依,有效保证用户采购设备的品质。通过《架空输电线路机器人巡检系统通用技术条件》的制定,还能推进机器人巡检系统规格的标准化、统一化工作,为该类产品在电网大规模应用奠定基础,降低用户使用、维护成本。4与相关标准的协调性本标准引用了相关技术标准的部分内容,与我国现行的法律、法规、政策及相关标准协调一致。5结束语经标准起草小组对标准的多次集中修改完善,现提出电力行业标准《架空输电线路机器人巡检系统通用技术条件》(征求意见稿)征求意见,广泛听取各方的意见,以便补充和进一步完善本标准。'
您可能关注的文档
- 建筑系统门窗技术导则
- 小城镇规划《技术导则》
- 重庆市农村康居工程建设技术导则
- 夏热冬冷地区既有居住建筑节能改造技术导则
- 河湖生态护岸工程技术导则
- 中国南方电网城市配电网技术导则
- 汉市深厚软土区域市政与建筑工程地面沉降防控技术导则
- 废润滑油回收与再生利用技术导则
- 安徽开发区规划编制技术导则
- sbt 10972-2013 建材及装饰材料安全使用技术导则
- 复合发泡水泥板外墙外保温系统应用技术导则
- 绿色建筑技术导则
- 青岛市城市桥梁检测技术导则
- 内蒙古自治区城市地下综合管廊建设技术导则
- 海域使用论证技术导则
- 吉林城市综合管廊建设技术导则
- 河北省村庄规划技术导则
- 居住区生活饮用水水质保障技术导则及制订说明