


- 4.65 MB
- 18页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'湖南大学工程训练项目报告蓝牙小车报告小组成员:班级:联系方式:目录
湖南大学工程训练项目报告一、引言------------------------------1二、总体方案------------------------------1三、电路与程序设计------------------------------3四、调试方案和调试结果------------------------------7五、遇到的问题和解决方案------------------------------7六、工程管理方案------------------------------8七、总结和体会------------------------------8八、实物图------------------------------9九、源程序-----------------------------10
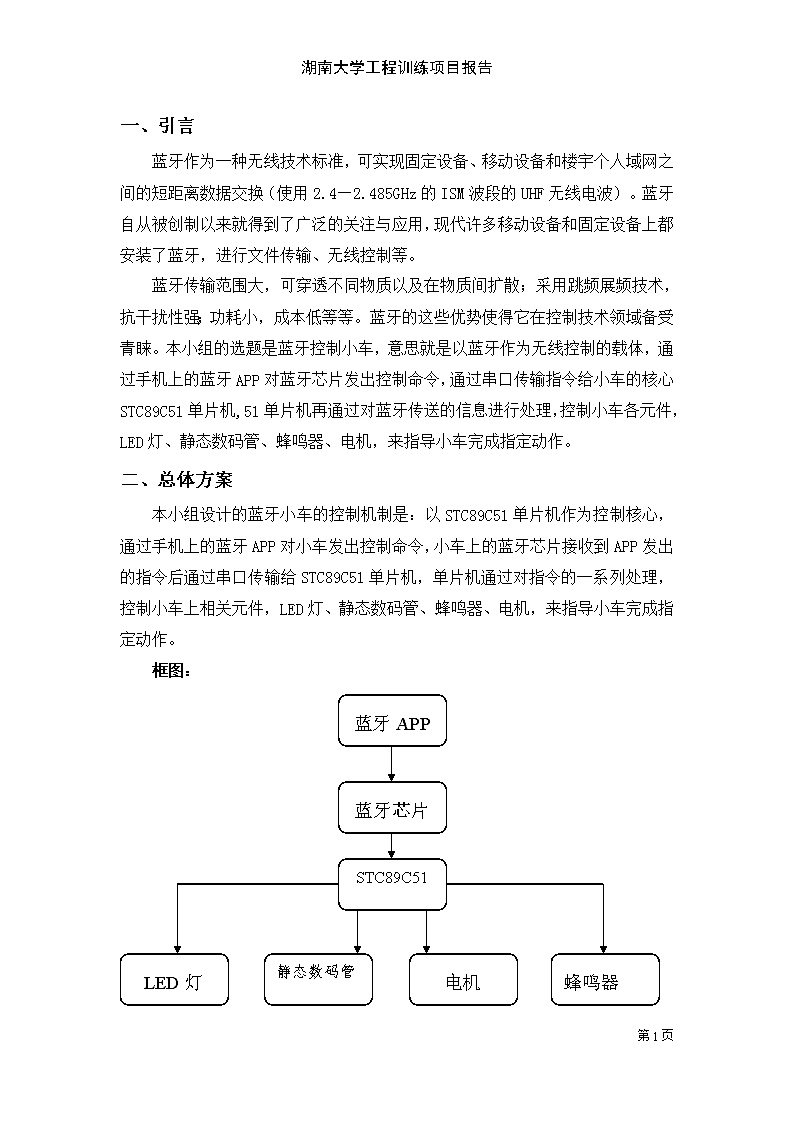
湖南大学工程训练项目报告一、引言蓝牙作为一种无线技术标准,可实现固定设备、移动设备和楼宇个人域网之间的短距离数据交换(使用2.4—2.485GHz的ISM波段的UHF无线电波)。蓝牙自从被创制以来就得到了广泛的关注与应用,现代许多移动设备和固定设备上都安装了蓝牙,进行文件传输、无线控制等。蓝牙传输范围大,可穿透不同物质以及在物质间扩散;采用跳频展频技术,抗干扰性强;功耗小,成本低等等。蓝牙的这些优势使得它在控制技术领域备受青睐。本小组的选题是蓝牙控制小车,意思就是以蓝牙作为无线控制的载体,通过手机上的蓝牙APP对蓝牙芯片发出控制命令,通过串口传输指令给小车的核心STC89C51单片机,51单片机再通过对蓝牙传送的信息进行处理,控制小车各元件,LED灯、静态数码管、蜂鸣器、电机,来指导小车完成指定动作。二、总体方案本小组设计的蓝牙小车的控制机制是:以STC89C51单片机作为控制核心,通过手机上的蓝牙APP对小车发出控制命令,小车上的蓝牙芯片接收到APP发出的指令后通过串口传输给STC89C51单片机,单片机通过对指令的一系列处理,控制小车上相关元件,LED灯、静态数码管、蜂鸣器、电机,来指导小车完成指定动作。框图:LED灯蜂鸣器静态数码管电机STC89C51蓝牙芯片蓝牙APP第16页
湖南大学工程训练项目报告原理图:第16页
湖南大学工程训练项目报告软件流程图:三、电路与程序设计(1)电路设计(各单元模块功能):1、控制器模块采用STC89C51单片机,可完全实现ISP在线编程,直接通过USB线为小车烧录程序做开发,不用购买转换器。作用:蓝牙小车的控制核心,通过对单片机烧录蓝牙控制程序,检测蓝牙信号,对接收到的蓝牙信号进行处理,对小车发出控制命令,从而完成无线控制。2.电机驱动模块运用两块LG9110驱动芯片来分别控制左前轮和右前轮。作用:用驱动芯片做单片机与马达的桥梁,当芯片接收到来自单片机的命令信号时,芯片会做出相应的命令来使第16页
湖南大学工程训练项目报告马达运作,当LG9110的7脚输入为高电压6脚输入为低电压时马达正转,当其6脚输入为高电压7脚输入为低电压时马达反转,从而实现控制左转与右转的功能;通过延时函数调节马达电压的占空比,实现小车的加速减速功能。3、蓝牙模块由手机上的蓝牙APP、安装在小车上的蓝牙接收芯片以及4条给STC89C51单片机传送命令的数据线组成。作用:通过手机上的蓝牙APP对小车发出控制命令,小车上的蓝牙接收器接收到APP发出的命令后传输给STC89C51单片机,单片机命令进行处理,指导小车完成指定的动作。蓝牙模块是沟通用户与设备的桥梁。4.电源模块采用4节1.5V干电池供电,电压达到6V,给单片机、电机和其他芯片供电。作用:给小车提供能源。5.发光二极管和蜂鸣器采用普通发光二极管和蜂鸣器分别发出光声进行提示。作用:两个发光二极管一直亮着表示小车处于前进状态;发光二极管闪烁和蜂鸣器鸣叫表示小车后退;左边的发光二极管亮而右边的发光二极管灭表示小车左转;右边的发光二极管亮而左边的发光二极管灭表示小车右转。6.静态数码管静态数码管用来显示小车的速度。(2)程序设计:1、软件设计原理:蓝牙芯片检测蓝牙信号,通过串口将蓝牙信号传递给STC89C51单片机。51单片机接收到蓝牙信号后,经过一定的处理计算,控制小车各部分元件。1)借助设定全局变量s,并通过改变占空比来模拟PWM控制小车行驶速度2)借助计时器中断,配合速度变量s来实现流水灯及流水灯速度变化3)利用延时函数实现LED灯闪烁及蜂鸣器蜂鸣2、设计所用工具:KeiluVision43、主程序流程框图:第16页
湖南大学工程训练项目报告开始初始化设置判断是否接到指令?NY执行指令4、中断服务子程序://串口中断用于接收蓝牙信号voidUsart()interrupt4{switch(SBUF){case0x40://前进case0x41://后退case0x42://左转case0x43://右转dat=SBUF;break;case0x46:if(s>1)s--;LED=date[s];break;//减速case0x45:if(s<3)s++;LED=date[s];break;//加速default:dat=0x00;}RI=0;//清除接收中断标志位}第16页
湖南大学工程训练项目报告//定时器中断用于流水灯voidTimer0()interrupt1{TH0=0x3C;//设置初始值TL0=0xB0;Time++;if((Time==(4-s))||(Time>3)){//满足条件时移动流水灯WATER=_crol_(WATER,1);Time=0;}}5、通信协议1)主从关系:蓝牙技术规定每一对设备之间进行蓝牙通讯时,必须一个为主角色,另一为从角色,才能进行通信,通信时,必须由主端进行查找,发起配对,建链成功后,双方即可收发数据。理论上,一个蓝牙主端设备,可同时与7个蓝牙从端设备进行通讯。一个具备蓝牙通讯功能的设备,可以在两个角色间切换,平时工作在从模式,等待其它主设备来连接,需要时,转换为主模式,向其它设备发起呼叫。一个蓝牙设备以主模式发起呼叫时,需要知道对方的蓝牙地址,配对密码等信息,配对完成后,可直接发起呼叫。2)呼叫过程:蓝牙主端设备发起呼叫,首先是查找,找出周围处于可被查找的蓝牙设备。主端设备找到从端蓝牙设备后,与从端蓝牙设备进行配对,此时需要输入从端设备的PIN码,也有设备不需要输入PIN码。配对完成后,从端蓝牙设备会记录主端设备的信任信息,此时主端即可向从端设备发起呼叫,已配对的设备在下次呼叫时,不再需要重新配对。已配对的设备,做为从端的蓝牙耳机也可以发起建链请求,但做数据通讯的蓝牙模块一般不发起呼叫。链路建立成功后,主从两端之间即可进行双向的数据或语音通讯。在通信状态下,主端和从端设备都可以发起断链,断开蓝牙链路。第16页
湖南大学工程训练项目报告3)数据传输:蓝牙数据传输应用中,一对一串口数据通讯是最常见的应用之一,蓝牙设备在出厂前即提前设好两个蓝牙设备之间的配对信息,主端预存有从端设备的PIN码、地址等,两端设备加电即自动建链,透明串口传输,无需外围电路干预。一对一应用中从端设备可以设为两种类型,一是静默状态,即只能与指定的主端通信,不被别的蓝牙设备查找;二是开发状态,既可被指定主端查找,也可以被别的蓝牙设备查找建链。四.小车的调试方案和调试结果(1)各模块调试方案和结果:1、控制器模块:打开小车开关,观察小车在初始程序下是否工作正常。通过测试,控制器模块工作正常。2、电机驱动模块:烧录电机控制程序,观察两个电机正反转是否正常。通过测试,电机驱动模块工作正常。3、蓝牙模块:下载手机蓝牙APP,并给单片机烧录蓝牙控制程序,通过APP发送命令,若小车做出指定动作,则蓝牙模块正常工作。通过测试,蓝牙模块工作正常。4、电源模块:安装电池,打开小车开关,观察小车电源灯是否亮。电源灯亮,电源模块工作正常。5、发光二极管、蜂鸣器和静态数码管:打开小车开关,观察发光二极管和蜂鸣器在初始程序下是否工作正常。通过测试,控制器模块工作正常。(2)系统功能调试方案和结果:在keil软件上编写程序之后,生成.hex文件,并将它烧录到单片机内,通过手机蓝牙APP给小车发送命令,观察小车是否完成了指定的命令动作,如不能则再次修改程序、检查电路,直至发现错误或测试成功。五.遇到的问题和解决方案(1)硬件制作:1、由于初步接触三极管,不能清楚分辨引脚,未能直接进行焊接,通过询问老师,上网查找资料等方法,顺利焊接成功;第16页
湖南大学工程训练项目报告2、实际焊接元器件与电路图有些许出入,通过参照模板及询问老师,将所有的元器件都焊接正确;3、组员对各类元器件焊接经验不足,焊接时经常出现各类细节问题处理不当,有时需拆下并重装相关部件。(2)程序编写:由于小组选定的课题是红外遥控小车,但在红外遥控小车的实现过程中遇到了无法解决的问题。当小车的电机工作时,小车的红外模块就不能正常工作,即当电机工作时,红外接收始终输出高电平,在更换红外接收及多次修改程序后,断定为小车电路结构问题,向老师反应这个问题后得到相同的答复。于是在老师的同意之后改为蓝牙控制小车;由于有了红外遥控的调试历练,再加上蓝牙遥控与红外遥控在原理上并无太大区别,所以很快便实现了蓝牙控制小车的所有功能。(3)功能调试:功能调试中共遇到两个问题。一个是电机调速问题,在通过查阅资料和询问老师之后,确定了利用延时函数改变占空比来模拟PWM控制小车行驶速度的方案。第二个问题是流水灯问题,在实现过程中发现用延时函数实现效果不佳,后经过多次试验,改为利用计时器实现流水灯,效果良好。六、工程管理方案(1)人力资源配置:组长黄金朋:主要负责小车各部分电路焊接与调整,以及MV拍摄及后期加工。组员李晓宇:主要负责小车软件部分,负责编程以实现小车各项功能。组员许炜娴:主要负责撰写终期检查报告,以及协助小车MV拍摄。(2)项目进度计划:首先完成了主板和各部件的焊接以及机械组装;接着,小组成员先通过图书馆借阅相关图书及网络查找相关资料等方式,了解并学习单片机编程及蓝牙遥控、电动机、LED灯、蜂鸣器等部分的工作原理;在充分学习之后,制定实现蓝牙遥控小车相关功能的方案,并进行编程,实现各项功能;最后对小车进行一定的调试,完善方案,并最终完成蓝牙小车的制作。七、总结与体会第16页
湖南大学工程训练项目报告通过蓝牙小车设计与制作,小组成员都受益匪浅,得到了很大的锻炼,无论是在理论知识方面,还是动手能力方面,都得到了极大的提高,所以,总体上来说本次电子实习任务还是具有很大的意义的。首先,在蓝牙小车硬件部分的制作中,小组成员通过合理的分工合作,互相帮助,更加扎实了焊接的基本功,此外也掌握了P型三极管和N型三极管的判别方法等等电子元件知识。然后在软件制作部分,根据本次设计要求,本小组系统地阅读了大量的资料,并认真分析了设计课题的需求,还系统学习了51系列单片机的工作原理及其使用方法,并独立设计蓝牙小车的整个项目。但是由于原本小组的课题是红外遥控,却因为小车的设计有问题,导致红外遥控无法实现,所以在编程过程中小组成员遇到的失败是很多的,但失败是成功之母,失败也是一种宝贵的财富,所以在失败中,小组成员学会了如何面对,如何寻找失败的原因。通过本次课题设计,加强了小组成员对专业知识的运用能力,同时也增强了自学能力、收集资料能力、动手能力以及分析解决问题的能力。当然,最重要的就是小组成员掌握了一种新的工具——keil,通过keil对单片机进行编程可以实现很多的控制功能。总之,在课题设计的过程中,无论是对于学习方法还是理论知识,我们都有了新的认识,受益匪浅,这将激励我们在今后再接再厉,不断完善自己的理论知识,提高实践运作能力。八、实物图第16页
湖南大学工程训练项目报告九、源程序#include#include#defineLEDP2//静态数码管#defineWATERP1//流水灯sbitIB1=P0^0;//LG9110引脚sbitIA1=P0^1;sbitIB2=P0^2;sbitIA2=P0^3;第16页
湖南大学工程训练项目报告sbitLEDR=P2^0;//D11sbitLEDL=P0^7;//D10sbitBeep=P0^6;//蜂鸣器sbithit=P3^5;//V3voidIrInit();//初始化函数voidConfiguration();//初始化中断voidbeep(unsignedcharc);//蜂鸣函数voiddelay(unsignedchari);//延时函数voidadvance();//前进函数voidback();//后退函数voidleft();//左转函数voidright();//右转函数unsignedchars=3,dat=0x00,Time=0;//s用于调节速度,dat用于存储接收到的蓝牙信号,Time用于流水灯计时unsignedcharcodedate[4]={0x00,0x9f,0x25,0x0d};//存储静态数码管输出voidmain(){//主函数IrInit();Configuration();while(1){switch(dat){case0x00:LEDL=LEDR=1;break;//停车case0x40:advance();break;//前进case0x41:back();break;//后退case0x42:left();break;//左转第16页
湖南大学工程训练项目报告case0x43:right();break;//右转}}}//初始化函数voidIrInit(){P1=0xff;//熄灭静态数码管LED=date[s];//显示当前速度IA1=IA2=IB1=IB2=0;//停止电机LEDL=LEDR=1;//熄灭前灯WATER=0Xfe;//流水灯初始Beep=1;//初始化蜂鸣器}//初始化中断voidConfiguration(){TMOD=0x21;//选择计时器工作方式TH0=0x3C;//设置初始值,定时50MSTL0=0xB0;ET0=1;//打开定时器0中断TR0=1;//启动定时器0SCON=0X50;//设置为工作方式1TH1=0XFD;//计数器初始值设置,注意波特率是9600的TL1=0XFD;ES=1;//打开接收中断EA=1;//打开总中断TR1=1;//打开计数器}第16页
湖南大学工程训练项目报告//串口中断用于接收蓝牙信号voidUsart()interrupt4{switch(SBUF){case0x40://前进case0x41://后退case0x42://左转case0x43://右转dat=SBUF;break;case0x46:if(s>1)s--;LED=date[s];break;//减速case0x45:if(s<3)s++;LED=date[s];break;//加速default:dat=0x00;}RI=0;//清除接收中断标志位}//定时器中断用于流水灯voidTimer0()interrupt1{TH0=0x3C;//设置初始值TL0=0xB0;Time++;if((Time==(4-s))||(Time>3)){//满足条件时移动流水灯WATER=_crol_(WATER,1);Time=0;}第16页
湖南大学工程训练项目报告}//延时函数voiddelay(unsignedchari){unsignedchara,b;for(;i>0;i--)for(b=38;b>0;b--)for(a=130;a>0;a--);}//前进函数voidadvance(){LEDL=LEDR=0;if(hit==0)return;//防碰撞IA1=IA2=1,IB1=IB2=0;delay(s+1);IA1=IA2=IB1=IB2=0;delay(3-s);}//后退函数voidback(){unsignedchari,j;for(i=0;i<2;i++){for(j=0;j<6;j++){IA1=IA2=0,IB1=IB2=1;beep(s+1);IA1=IA2=IB1=IB2=0;beep(3-s);第16页
湖南大学工程训练项目报告}LEDL=!LEDL,LEDR=!LEDR;//使前灯闪烁}}//左转函数voidleft(){LEDL=0,LEDR=1;IB1=IA2=1,IA1=IB2=0;beep(s+1);IA1=IA2=IB1=IB2=0;beep(3-s);}//右转函数voidright(){LEDL=1,LEDR=0;IA1=IB2=1,IB1=IA2=0;beep(s+1);IA1=IA2=IB1=IB2=0;beep(3-s);}//蜂鸣函数voidbeep(unsignedcharc){unsignedchara,b;for(c=c*10;c;c--){Beep=!Beep;for(a=10;a;a--)第16页
湖南大学工程训练项目报告for(b=45;b;b--);}}第16页'
您可能关注的文档
- 天津拿地方案 新开路项目报告
- 中国制冷空调企业十二五战略规划咨询项目报告
- 义务教育加气混凝土项目报告书
- 中国连接器企业十二五战略规划咨询项目报告
- 拉斯维加斯威尼斯商业综合体项目报告
- 武汉中心城区城市综合体项目 埠城项目报告
- 污水站项目报告表
- 义务教育加气混凝土项目报告书(2)
- 西安赛威短舱有限公司喷漆房项目报告书全本环境影响评价报告全本
- 启源(西安)大荣环保科技有限公司年产30000立方米脱硝催化剂项目报告书
- 甘肃天水传染病医院项目报告书
- 多功能时尚便携u盘项目报告书
- 广东省广州市天河城购物中心项目报告
- 无锡金波通用扭振减震器有限公司扩建项目报告-江苏工程咨询中心
- 甘肃省兰州市永登县甘肃永登县景顺农业科技开发有限公司肉牛养殖项目报告书全本
- 连翘调研项目报告
- 福建省宁德市福建宁德市东湖中央公园项目报告书全本
- 西安杨森制药有限公司强生供应链生产基地项目报告书简本