


- 1.02 MB
- 11页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'青建集团股份公司企业工法CNQC-GF13012复杂造型曲面网架测量及变形监测施工工法ConstructionMethodofComplicatedSurfacesModelingGridStructuremeasurementanddeformationmonitoring2009年10月1日发布2009年12月1日实施青建集团股份公司发布
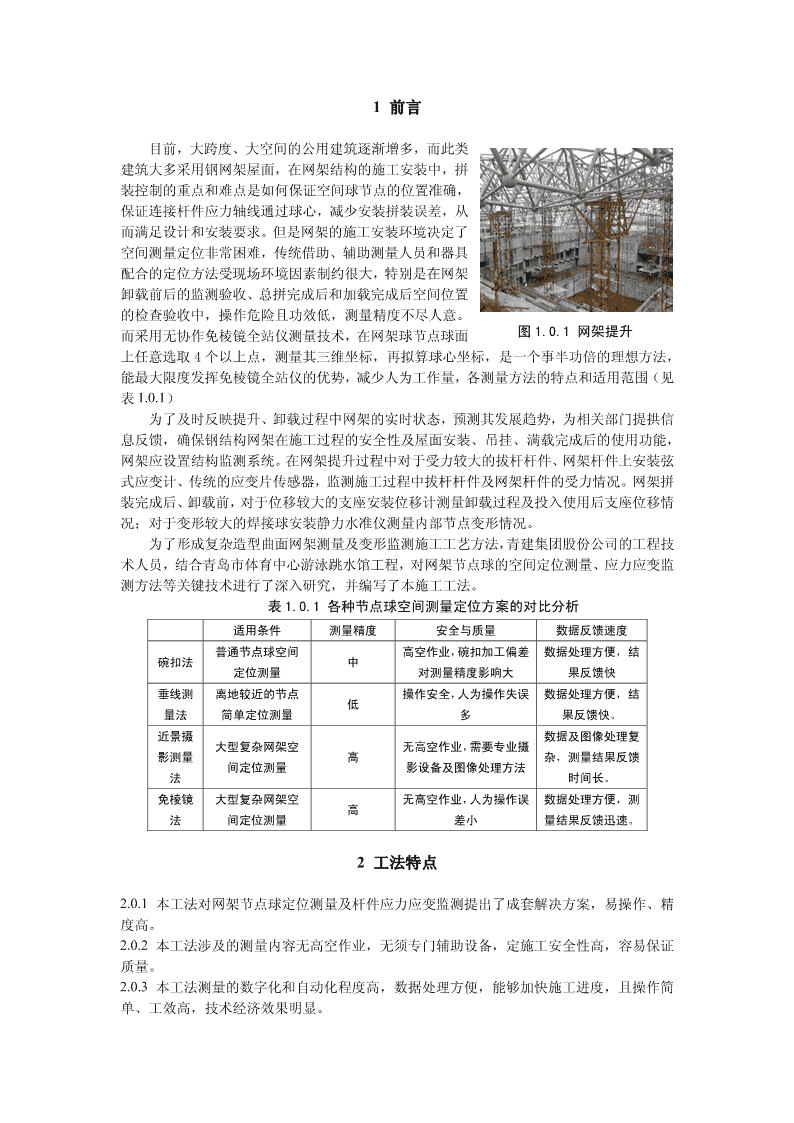
1前言目前,大跨度、大空间的公用建筑逐渐增多,而此类建筑大多采用钢网架屋面,在网架结构的施工安装中,拼装控制的重点和难点是如何保证空间球节点的位置准确,保证连接杆件应力轴线通过球心,减少安装拼装误差,从而满足设计和安装要求。但是网架的施工安装环境决定了空间测量定位非常困难,传统借助、辅助测量人员和器具配合的定位方法受现场环境因素制约很大,特别是在网架卸载前后的监测验收、总拼完成后和加载完成后空间位置的检查验收中,操作危险且功效低,测量精度不尽人意。而采用无协作免棱镜全站仪测量技术,在网架球节点球面图1.0.1网架提升上任意选取4个以上点,测量其三维坐标,再拟算球心坐标,是一个事半功倍的理想方法,能最大限度发挥免棱镜全站仪的优势,减少人为工作量,各测量方法的特点和适用范围(见表1.0.1)为了及时反映提升、卸载过程中网架的实时状态,预测其发展趋势,为相关部门提拱信息反馈,确保钢结构网架在施工过程的安全性及屋面安装、吊挂、满载完成后的使用功能,网架应设置结构监测系统。在网架提升过程中对于受力较大的拔杆杆件、网架杆件上安装弦式应变计、传统的应变片传感器,监测施工过程中拔杆杆件及网架杆件的受力情况。网架拼装完成后、卸载前,对于位移较大的支座安装位移计测量卸载过程及投入使用后支座位移情况;对于变形较大的焊接球安装静力水准仪测量内部节点变形情况。为了形成复杂造型曲面网架测量及变形监测施工工艺方法,青建集团股份公司的工程技术人员,结合青岛市体育中心游泳跳水馆工程,对网架节点球的空间定位测量、应力应变监测方法等关键技术进行了深入研究,并编写了本施工工法。表1.0.1各种节点球空间测量定位方案的对比分析适用条件测量精度安全与质量数据反馈速度普通节点球空间高空作业,碗扣加工偏差数据处理方便,结碗扣法中定位测量对测量精度影响大果反馈快垂线测离地较近的节点操作安全,人为操作失误数据处理方便,结低量法简单定位测量多果反馈快。近景摄数据及图像处理复大型复杂网架空无高空作业,需要专业摄影测量高杂,测量结果反馈间定位测量影设备及图像处理方法法时间长。免棱镜大型复杂网架空无高空作业,人为操作误数据处理方便,测高法间定位测量差小量结果反馈迅速。2工法特点2.0.1本工法对网架节点球定位测量及杆件应力应变监测提出了成套解决方案,易操作、精度高。2.0.2本工法涉及的测量内容无高空作业,无须专门辅助设备,定施工安全性高,容易保证质量。2.0.3本工法测量的数字化和自动化程度高,数据处理方便,能够加快施工进度,且操作简单、工效高,技术经济效果明显。
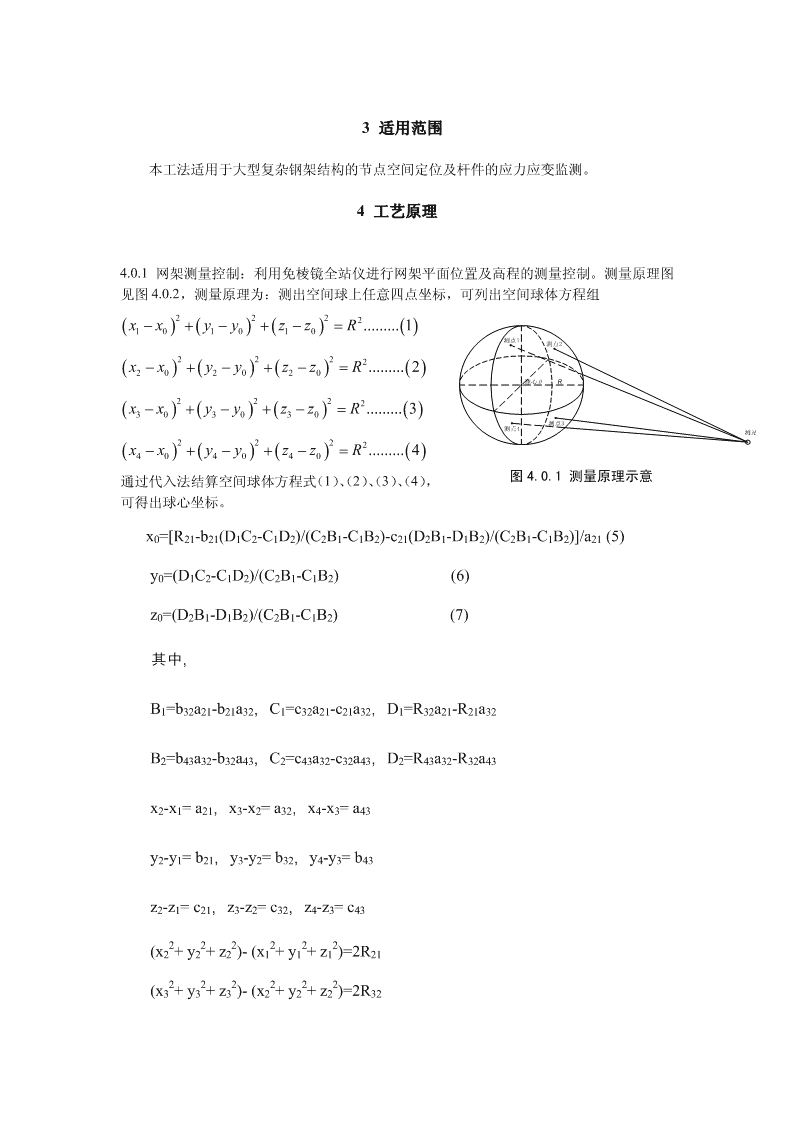
3适用范围本工法适用于大型复杂钢架结构的节点空间定位及杆件的应力应变监测。4工艺原理4.0.1网架测量控制:利用免棱镜全站仪进行网架平面位置及高程的测量控制。测量原理图见图4.0.2,测量原理为:测出空间球上任意四点坐标,可列出空间球体方程组2222()xx10−+−+−=()yy10()zz10R.........1()测点1测点22222()xx20−+−+−=()yy20()zzR20.........2()球心OR2222()xx30−+−+−=()yy30()zz30R.........3()测点3测点4测站2222()xx40−+−+−=()yy40()zzR40.........4()图4.0.1测量原理示意通过代入法结算空间球体方程式(1)、(2)、(3)、(4),可得出球心坐标。x0=[R21-b21(D1C2-C1D2)/(C2BB1-C1B2B)-c21(D2BB1-D1B2B)/(C2BB1-C1B2B)]/a21(5)y0=(D1C2-C1D2)/(C2BB1-C1B2B)(6)z0=(D2BB1-D1B2B)/(C2BB1-C1B2B)(7)其中,BB1=b32a21-b21a32,C1=c32a21-c21a32,D1=R32a21-R21a32BB2=b43a32-b32a43,C2=c43a32-c32a43,D2=R43a32-R32a43x2-x1=a21,x3-x2=a32,x4-x3=a43y2-y1=b21,y3-y2=b32,y4-y3=b43z2-z1=c21,z3-z2=c32,z4-z3=c43222222(x2+y2+z2)-(x1+y1+z1)=2R21222222(x3+y3+z3)-(x2+y2+z2)=2R32
222222(x4+y4+z4)-(x3+y3+z3)=2R434.0.2网架应力应变监测:为了及时反映出拔杆网架的实时状态,预测其发展趋势,为相关部门提拱信息反馈,确保钢结构网架在施工过程的安全性及屋面安装、吊挂、满载完成后的使用功能,应设置网架结构无线监测系统,监测原理见图4.0.2。在网架提升过程中对于受力较大的拔杆杆件、网架杆件上安装弦式应变计、传统的应变片传感器,监测施工过程中拔杆杆件及网架杆件的受力情况。网架拼装完成后、卸载前,对于位移较大的支座安装位移计测量卸载过程及投入使用后支座位移情况;对于变形较大的焊接球安装静力水准仪测量内部节点变形情况。无线监测系统包括密封机箱、无线传输模块、电源控制器、自动采集箱、弦式应变计、静力水准仪以及主线和分线等。监测杆件的布置主要是以两个原则:重力荷载情况下和最不利工况荷载下最大内力杆件,分布主要集中在支座和跨中附近。图4.0.2无线监测系统原理5工艺流程及操作要点
5.1工艺流程网架拼装提升工艺工艺流程见图5.1.1。图5.1.1网架结构测量、监测工艺流程5.2操作要点5.2.1施工定位测量:1.地面拼装及提升阶段的测量拼装施工前,建立平面坐标系和高程控制网,各控制点之间能通视。每个网架提升、卸载阶段,测量人员均应对网架平面位置及高程进行一次测量,并将测量数据及时反溃到现场管理人员手中,对网架存在的偏差及时调整。组装前依据设计图纸和土建轴线精确放线,确定焊接球网架球节点投影位置(同安装完毕后屋面网架球节点垂直投影位置),并确定提升井架的安装位置。在已确定的节点球位置砌筑网架组装砖垛平台,每个砖垛平台为380㎝图5.2.1地面拼装节点球相对位置控制示意×380㎝×280㎝,砖垛用水泥砂浆找平,要求水泥砂浆表面在同一标高。砖垛平台砌筑完成后,要根据设计图纸的几何尺寸和土建提供的轴线用经纬仪精确放线,确定网架节点投影位置,同时用水平仪进行找平,划出十字中心线,以确保位置的正确。为了便于施工,提高工程进度,下弦组装前其腹杆和上弦杆应根据图纸对号入座,搬运到位。腹杆和上弦杆的组装应在下弦全部组装结束后,经测量无超差的基础上进行组装,由图纸中对应的杆件在拼装时来确定焊接球的位置,其方法从中心开始组装,随时检查纵横轴线的几何尺寸,并进行校正然后向四周组装。为了减小网架在拼装过程中的积累误差,随时校正尺寸,检查无误后方能从中心向四周展开,其要求对角线(小单元)允许误差为±3mm,下弦节点偏移为2mm,整体纵横的偏差值不得大于±2mm。整体下弦组装结束后对几何尺寸进行检查,必要时应用经纬仪校正同时用水平仪抄出各点高低差进行调整,并作好记录。按计录的内容设置临时支撑点。
为了保证就位后的钢结构各球节点与设计位置吻合,在拼装过程中应对网架进行预起拱,确定网架各球节点在预起拱时的空间位置。以极坐标、直角坐标及距离交会等常规测量方法进行。待拼装网架的平整度、高度采用全站仪进行测量控制。2提升和卸载过程中的测量控制由于网架形状复杂,且提升过程需要不断的扩展拼装,卸载时要控制结构的挠度变化,而采用传统的测量方法又难以保证网架拼装的精度。因此免棱镜测量空间坐标的方法进行测量,测量原理见4.0.1节,在选取测点时应尽量使测点在网架上均匀分布,在关键部位如网架最高点、跨中、支座附近等必须布置测点。5.2.2应力应变监测变形与应力监测:随着网架拼装与提升的进度,分阶段进行监测系统设备的安装。系统安装调试完成后,应重点将用电线路及数据传输线路集中布线,防止施工过程中的破坏,从而影响正常监测。如图5.2.4所示无限监测系统。图5.2.2所示无限监测系统6材料与设备6.1材料6.1.1焊接材料(焊条、焊丝);静力水准仪钢筋支架;防冻液;绝缘胶带;防锈漆;铜质三通接头。6.1.2数据总线;数据分支线6.2机具本工法涉及的主要机具包括:免棱镜全站仪、数据采集仪等,见表6.2.1。表6.2.1主要机具序号名称型号规格备注1免棱镜全站仪LEICATCR402配套数据处理系统2数据采集仪YH-08-usb可选固定式或便携式3无线传输模块YH6600支持gprs的数据传输模块4弦式应变计YH智能II型数量根据现场需要配备5静力水准仪YH基本型6接收端pcIBMX31XP以上系统7直流电焊机AX-320-1
7质量控制7.1规范与标准7.1.1《钢结构设计规范》(GB50017-2003)7.1.2《网壳结构技术规程》(JGJ61—2003)7.1.3《钢结构工程施工质量验收规范》(GB50205-2002)7.1.4《建筑工程施工质量验收统一规范》(GB50300-2001)7.1.5《网架结构设计与施工规程》(JGJ7-91)7.1.6《钢网架检验及验收标准》(JG12-1999)7.2质量控制措施7.2.1技术准备:正式施工前提前完成图纸的深化设计及测量方案的编制,且两者必须相互结合,测量方案要及时为现场施工提供各项指导数据,并应根据现场施工的进度调整测量方法。7.2.2现场准备:测量和监控的实施应在土建完成后进行,布设测量控制网及监控点,现场的测点布设要考虑现场施工情况,紧跟施工进度。7.2.3仪器准备:对测量、监测所用的设备应提前校准,监测设备(读数仪)应提前对未安装的振弦传感器进行预读数,并观察数据有无异常。7.2.4过程控制:网架施工过程中,测量和监测应同步进行,数据反馈到网架施工人员,及时调整偏差;监测应贯穿网架施工的全过程,对网架各主要构件的应力应变数据进行处理,评估构件的安全性,为现场安全施工提供数据支持。8安全措施8.0.1网架施工前的必须对混凝土结构本身、网架本身、提升设备进行模拟分析计算,确保均在受力允许范围内,方可进行网架正式施工,结构监测作为安全监测重要手段。8.0.4严格预防高空坠落,测量人员的四周应设置防护,以保证测量人员安全。8.0.5部分振弦传感器的高空安装应保证操作者的安全,在网架上设置安全钢丝绳,并佩戴安全带。8.0.6按照三级配电要求进行临电布置,电焊机集中布置,电(火)焊皮线、电源线、数据主(支)线布设合理、规范,监测仪器的永久用电应和建筑用电同时布线,不可悬空吊设或飞线。9环保措施9.0.1文明施工。进场构件按照平面布置要求分类摆放整齐、标识明确,剩料统一收集至废品回收池,保持环境整洁,且避免造成废弃物污染。9.0.2油漆污染控制。进场油漆集中封闭堆放,在喷涂操作的周边操作面做法油漆的接挡工作,避免造成工作面的交叉污染。
10效益分析10.1经济效益10.1.1成本分析。本工法的测量设备简单,节约了大量的材料费、人工费,施工措施费大大降低。与常规测量方法费用对比见表10.1.1。表10.1.1各测量费用对比分析测量测量置镜测量人费用合工程量方法配件人工费工费计碗扣碗扣碗扣80个×700元=56000元7000050000176000测量免棱///5000050000镜法10.1.2工期分析。免棱镜法测量数据反馈迅速,加快了钢网架施工进度。10.1.3质量安全分析。利用本工法测量、监测方法解决了复杂造型网架空间定位难的问题,保证各节点相对位置准确且避免高空作业带来的不安全因素。10.2社会与环保效益采用本工法进行大跨度钢结构空间定位测量和监测施工,测量速度加快,钢结构施工周期变短,避免了高空作业,降低资源消耗,具有较好的社会和环保效益。11工程实例11.1青岛体育中心游泳跳水馆工程11.1.1工程概况青岛体育中心游泳跳水馆工程总建筑面积246787m,可容纳观众3015人,下部为混凝土结构,上部为焊接空心球节点四角锥网架,网格尺寸为4m×4m左右不等。南北向跨度为101.2m,东西向跨度130m,最高处标高为30.70m,最低处标高为-10.8m。网架投影面积为15041㎡,展开面积为18000㎡,网架形式如图1所示。网架结构总重量约1600吨,其中室内图11.1.1青岛体育中心游泳跳部分网架重量约为1100吨。网架结构中杆件重量约为1000吨,其中最大规格杆件为Ø377×28㎜,最小规格杆件为Ø60×3㎜;焊接球重量约为500吨,其中最大球径为:800㎜,最小球径为300㎜。网架在混凝土结构上拼装,再采用拔杆进行分块提升,各分块到达设计位置后进行空中对接,连成网架整体。地面拼装时根据设计图纸确定节点球之间的相对位置,在拔杆提升过程中提升单元可能会倾斜或偏移,图11.1.2网架结构的俯视及侧视
且提升过程需要不断的扩展拼装,为了保证按设计位置在空中对接,需要控制各节点球在空中的位置,传统的借助、辅助测量人员和器具配合的定位方法在现场不易开展。测量难点:(1)网架在地上拼装时如何确保节点及杆件正确的相对空间位置(2)提升过程中需快速获知控制节点的实际空间坐标,与设计坐标进行对比,调整位置(3)卸载过程对网架的挠度进行测量控制11.1.2测量数据分析(1)提升过程对接偏差网架提升和对接过程的测量可以很好的控制施工偏差,提高安装精度,现把施工过程中的84个测点的测量数据与设计坐标进行对比,并把偏差范围数值列于表1表11.1.2偏差范围统计表<55-1010-1515-2020-2525-3030-35△X3122129541△Y3626106321△R1738157232△X占总数百分比0.940476190.05952381△Y占总数百分比0.9642857140.035714286△R占总数百分比0.940476190.059523814035△X30△Y25△R20累积数量%151050<55-1010-1515-2020-2525-3030-35偏差范围(mm)图11.1.3偏差范围统计由表1和图7可以看出,通过免棱镜方法进行测量可以很好的控制网架各节点的偏差,其中94%的测点坐标与设计坐标之间的偏差不超过25mm,完全满足规范的要求。(2)挠度控制在卸载前后对同一测点分别进行免棱镜法测量,并算出节点球心的坐标,通过前后数据的对比可以得出网架结构的挠度水平向的位移,部分测点数据列于表2中。表11.1.3卸载挠度计算表卸载前球心坐标(m)卸载后球心坐标(m)挠度(m)测点编号xyzxyz1240016.4629107183.198514.5901240016.5225107183.279814.55000.04012240028.0668107160.297618.0500240028.1603107160.299117.98980.06023239999.7700107164.022320.9154239999.8256107164.050920.84330.07214239996.0086107160.405322.3908239995.9391107160.346522.30750.08335239987.6702107171.694619.3708239987.6105107171.661919.29140.07946239984.8836107182.786416.9585239984.7942107182.780516.89590.0626
7239988.9362107182.793216.3109239988.9714107182.880116.26510.04588239981.6118107179.310517.7720239981.6618107179.392917.72980.0422根据测量结果,网架的整体平均挠度为6.4cm,部分位于高拱处的节点挠度可达8cm,由于在拼装过程中考虑到结构自重变形对网架的影响,已对部分网架进行了预起拱,已抵消了这部分非施工性偏差。11.1.3结论大型复杂钢网架结构在安装过程的中的测量和空间定位对结构的成型及精度控制非常重要,通过本文介绍的测量控制方法,可以方便快捷的对整体结构和单个节点进行精确定位,加快了施工进度,保证了工程质量。免棱镜法可以使用在钢结构安装特别是在网架工程等空间球体的施工安装定位和后期的阶段性验收及变形监测中,提高测量的数字化和自动化程度,满足了复杂钢网架结构的安装精度要求。编写:付长春审核:批准:张同波
'
您可能关注的文档
- 浅议跨臂法滑模摊铺水泥混凝土桥(路)面施工工法
- 浅议道桥中高速公路路面施工工法
- 西格玛保温装饰板外墙外保温施工工法
- 隧道软弱围岩三台阶七步开挖施工工法探究
- 面积混凝土地面机械化一次性施工工法_secret
- 石材墙、地面结晶处理施工工法.doc
- 沥青路面施工工法
- 旋挖钻机及其施工工法
- 小单元组合反吊顶施工工法
- 4-强夯法处理湿陷性黄土地基施工工法
- cfz-1500型冲击反循环钻机钻孔桩施工工法(yjgf11-2000)
- x222_预应力高强砼(phc)静x压管桩施工工法(修改)[1]
- 地下连续墙成槽施工工法及设备适用性分析
- 大直径水泥衬里钢管施工工法
- 屈曲约束支撑安装施工工法
- 搅拌桩联合插塑板复合加固软土地基施工工法
- 浅谈搓管机全套管施工工法
- 钢筋混凝土结构填充墙后植入拉结筋施工工法