


- 173.36 KB
- 3页

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
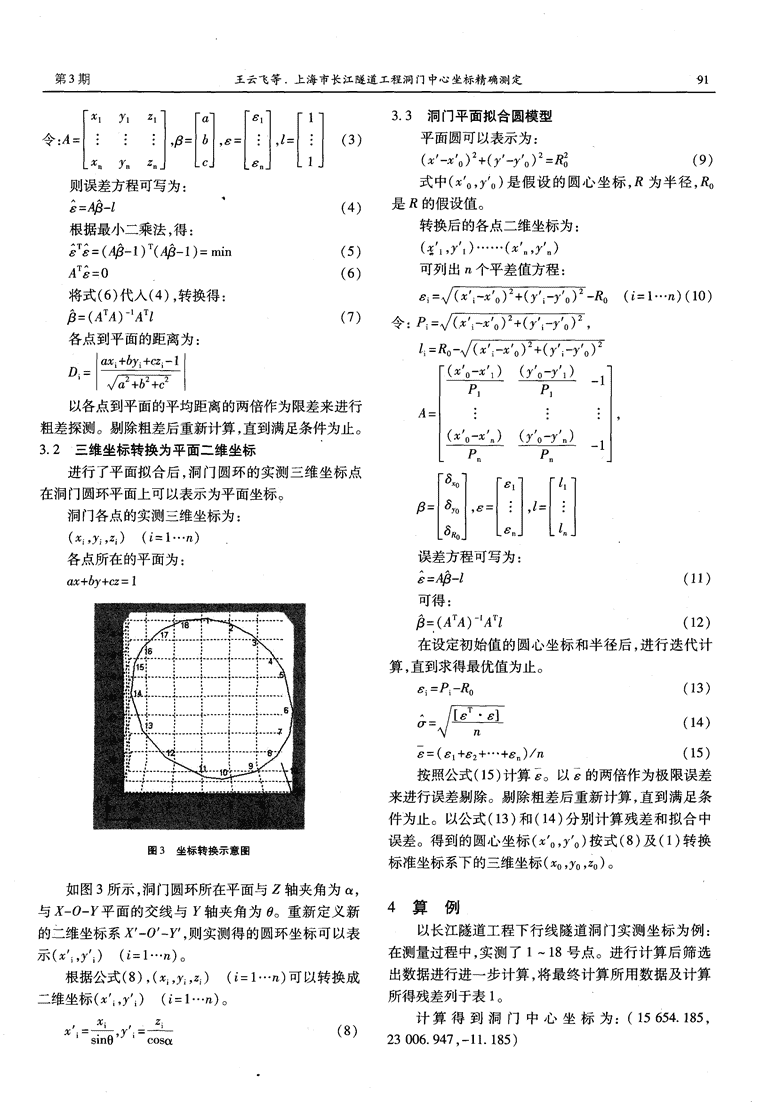
城市勘测2009正文章编号:1672—8262(2009)03—90—03中图分类号:P258文献标识码:B上海市长江隧道工程洞门中心坐标精确测定’王云飞,崔华,张磊晔,康明(上海市测绘院浦东分院,上海200129)摘要-:~t据上海市长江隧道工程贯通处洞门中心坐标测量的卖际情况,利用数学方法将空间三维的洞门钢环实测坐标拟合出三维方程,精确求取钢环中心的三维坐标。关键词:上海市长江隧道;洞门中心测量;空间圆拟合;最小二乘法1引言一层平台上,利用SOKKIASET230R测量系统的免棱上海市长江隧道是上海市长江隧桥工程中的重要镜功能实测洞门圆环的内侧点的三维坐标(见图2)。组成部分,位于上海市浦东新区曹路镇以东约3km处的五号沟。上海长江隧道工程采用盾构法隧道掘进,由浦东向长兴岛方向推进。盾构直径达l5.43m,是目前世界上最大直径的隧道,其隧道段长约7.47km。上海长江隧道工程隧道在登陆岸长兴岛基坑的预留洞门由预制钢环拼装而成,成型圆形钢环设计直径为16m。在成型圆环外侧由加厚的混凝土井壁作为支撑,保证其稳定。圆环内留有一层薄水泥井壁,等贯通时盾构机从圆环中破壁并入洞(见图1)。贯通处预留洞门的中心坐标是盾构机掘进的目标。预留洞门中心坐标求取精度的好坏直接影响到隧道贯通的精度。图2洞门实测坐标点3.空间圆拟合在得到洞门圆形钢环内侧各点的实测三维坐标后,先用各点坐标拟合出洞门所在的平面,将各点三维坐标投影到洞门平面上,利用平面坐标拟合出圆环圆心,同时返算成标准的空间三维坐标。3.1洞门平面拟合模型图1上海长江隧道工程洞门洞门圆环所实测的坐标首先必定都是在圆环所在平面上的,那么需对实测的三维坐标进行平面拟合,剔2洞门中心坐标测量施测过程除明显偏离平面的粗差点。预留洞门中心坐标的求取实际上就是求取钢制圆空问任意平面可以表示为:环的圆心三维坐标。由于预留洞门的特殊用途,所以ax+by+cz=1(1)对于洞门圆环的变形要求严格控制,根据洞门钢环的实测得到的各点三维坐标为:制作工艺和实际情况了解,笔者判定该圆环是一个较(1,Y1,1)⋯⋯(,Y,z)稳定,且变形很小的标准圆形。在测量过程中假设圆可列出n个平差值方程:形钢环为标准圆形,以施工场地内平高控制点作为起si-~ctxi+6yi+ci一1(i:1⋯n)(2)算数据,将平面及高程坐标传递至洞门正对面的地下收稿日期:20O8一ll—25作者简介:王云飞(1984一),男,助理工程师,主要从事工程测量工作。
第3期王云飞等.上海市长江隧道工程洞门中心坐标精确测定9l1]3.3洞门平面拟合圆模型《:=J(3)平面圆可以表示为:[],=[],=[],z:[1j(Xp_0)+(-y。)=(9);:一l’(4)是R的假设值。转换后的各点二维坐标为:;;=(一1)(一1)=min(5)(,Y)⋯⋯(,,,)ATb=o(6)可列出个平差值方程:将式(6)代人(4),转换得:i=√(i—0)+(yti-Y0)一R0(=1⋯)(10)=(4A)-1Af(7)令:Pi=√(i一o)+(),i—0)2,各点到平面的距离为:zi=R0一√(i—0)+(yti-y0)。i=(0一1)faxi+byi+czi-1IPJ一1PJ以各点到平面的平均距离的两倍作为限差来进行A=i;粗差探测。剔除粗差后重新计算,直到满足条件为止。(0一)3.2三维坐标转换为平面二维坐标P一1‘P进行了平面拟合后,洞门圆环的实测三维坐标点在洞门圆环平面上可以表示为平面坐标。=8:洞门各点的实测三维坐标为:6(i,Yj,)(i:1⋯).各点所在的平面为:误差方程可写为:ax+by+cz=l;=一z(11)可得:=(A)Az(12)在设定初始值的圆心坐标和半径后,进行迭代计算,直到求得最优值为止。i=Jpi—Ro(13)=√(14)s=(1+2+⋯+)/n(15)按照公式(15)计算。以;的两倍作为极限误差来进行误差剔除。剔除粗差后重新计算,直到满足条件为止。以公式(13)和(14)分别计算残差和拟合中误差。得到的圆心坐标(。,Y。)按式(8)及(1)转换图3坐标转换示意图标准坐标系下的三维坐标(。,Y。,)。如图3所示,洞门圆环所在平面与z轴夹角为,与X—O—Y平面的交线与l,轴夹角为0。重新定义新4算例的二维坐标系一O一y,则实测得的圆环坐标可以表以长江隧道工程下行线隧道洞门实测坐标为例:示(i,Yi)(1⋯/Z)。在测量过程中,实测了1~18号点。进行计算后筛选根据公式(8),(i,Yj,)(i=1⋯n)可以转换成出数据进行进一步计算,将最终计算所用数据及计算二维坐标(i,Yi)(=1⋯/7,)。所得残差列于表1。2bi计算得到洞门中心坐标为:(15654.185,i=一Yi=L(8)sinO,YiL23006.947.一11.185)
城市勘测2009正、计算数据及结果表表1合。在本文中对实测方案和拟合计算过程进行了详细介绍。根据洞门圆环实测坐标进行平面拟合,剔除粗差后将三维坐标转换到平面二维坐标系中,利用最小二乘法进行圆心拟合。通过在长江隧道工程洞门中心坐标测量中的实际使用,验证了本方法的精度及其可靠性。参考文献[1]武汉测绘科技大学《测量学编写组》.《测量学》(第三拟合得出洞门半径为8.007m,拟合中误差为版).北京:测绘出版社,2000±0.006m。由于洞门钢环设计半径为8m,考虑到在[2]华锡生,黄腾编著.精密工程测量技术及应用.南京:河实测过程瞄准时适当外移,且钢环加工的误差,拟合得海大学出版社,2002出的钢环半径可以认为是正确的,再根据得出的拟合[3]胡伍生,潘庆林黄藤主编.土木工程测量手册.北京:人中误差,认定本方法适用于洞门中心坐标的精确确定。民交通出版社,2005[4]樊功瑜.误差理论与测量平差.上海:同济大学出版社,】9985结论本文主要利用最小二乘法对空间三维圆进行拟TheCenterCoordinateSurveyofPortalHoleinShanghaiYangtzeRiverTunnelWangYunFei,CuiHua,ZhangLeiYe,KangMing(ShanghaiInstituteofSurveyingandMapping,Shanghai200129,China)Abstract:AccordingtotheactualcaseinthecentercoordinatesurveyofportalholeinshanghaiYangtzeRivertun’nelthrough,amathematicmethodisexplored,whichisfittingthethree-dimensionalequationaftergainingtheactualCO‘ordinateofsteelringinportalhole.Theprecisethree-dimensionalcoordinatesinthecenterofsteelringisobtained.Keywords:ShanghaiYangtzeRiverTunnel;centercoordinatesurveyofportalhole;SpaceCircularFitting;LeastSauaIles(上接第84页)Large-ScaleTopographicMapsUpdatedTechnicalMethodsofResearchandUnderstandingWangJingHong(WenzhouUrbanPlanningBureau,Wenzhou325000,China)Abstract:Accordingtothearticle,themaincityoflarge-scaletopographicmapsupdatedmethodsofsurveyingandmappingtechnologyresearchandunderstandingofthecitythroughthecurrenteconomicandsocialdevelopmentofthecitySlarge—scaletopographicmapsareofpotentialdemand,toexplorewaystoupdatetopographicmapsinordertosolvethemainproblem,accordingtothesametimeScaletopographicmapsofdifferentwaystoupdatetechnology,amoresci-entificandreasonablemethodforreference.Keywords:Topographicmap;update;technology