


- 934.00 KB
- 35页


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
第六章控制测量控制测量概述导线测量交会定点高程控制测量小三角测量三、四等水准测量
§6.1控制测量概述测量工作必须遵循“从整体到局部”“先控制后碎部”的原则来组织实施。
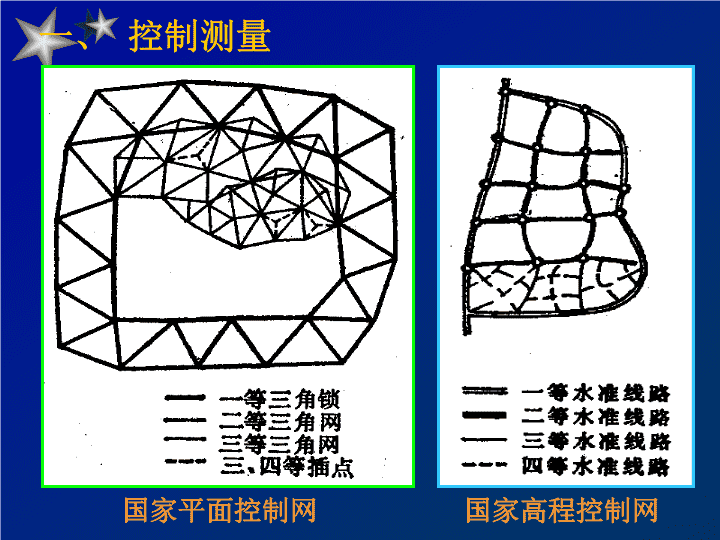
国家平面控制网国家高程控制网一、控制测量
城市平面控制网的主要技术要求见表三角网的主要技术要求等级平均边长(km)测角中误差(")起始边边长相对中误差最弱边边长相对中误差二等9≤±1.0≤1/300000≤1/120000三等5≤±1.8≤1/200000(首级)≤1/120000(加密)≤1/80000四等2≤±2.5≤1/120000(首级)≤1/80000(加密)≤1/45000一级小三角1≤±5.0≤1/40000≤1/20000二级小三角0.5≤±10.0≤1/20000≤1/10000
§6.2导线测量一、导线测量概述由测量人员根据测量任务在测区内选定若干控制点,组成的多边形或折线称导线,这些点称导线点。1.附合导线ABCD1234
2.闭合导线AB12345三角点(已知控制点)导线点
ABCD12341-11-23.支导线
二、导线测量的外业工作踏勘选点,布网设计埋石(埋桩)、编号、作点之记测量导线边长观测水平角(联接角和折角)
三、导线测量的内业工作ABCD1234αABαCD已知方位角已知方位角折角(水平角)β3β4β5β6βB(一)附合导线计算
附合导线内业计算
(二)闭合导线计算角度闭合差的计算与调整坐标增量计算
1.坐标方位角的计算与调整推算出CD边的坐标方位角为计算闭合差图根导线的角度容许闭合差为
2.坐标增量闭合差的计算与调整各边坐标增量分别为fx=ΣΔx计-ΣΔx理=ΣΔx计-(x终-x始)fy=ΣΔy计-ΣΔy理=ΣΔy计-(y终-y始)
3.计算改正后的坐标增量
§6.3小三角网测量三角网是传统平面控制网的主要形式之一。在城市控制网和工程控制网中,三角网常用的基本图形有:一、三角网概述(b)中
以往主要是通过三角测量(即观测全部水平角)的方法来建立三角网。随着电磁波测距仪测距精度及自动化程度的日益提高,不断改进着测量的传统方法。三边网测量(观测全部边长)和边角网测量得到了广泛应用,三角网也随之扩展为三边网和边角网。尤其是边角网,既测角又测边,能有效地提高整个网形的结构强度和点位精度,已成为目前最常用的布网形式。边角网有以下几种情况:a.观测全部边长和全部角度;b.在测边网中加测部分角度;c.在测角网中加测部分边长;d.观测部分边长和部分角度。
1.图形良好,边长适中。各三角形内角尤其是用于计算边长的传距角应不小于30,不大于120,尽可能布设成等边三角形。2.为便于扩展和加密,点位应选在视野开阔、土质坚实的高处,相邻点位间应互相通视。选点后,应在地面上埋设标志。等级边角网点,须埋设混凝土桩。图根边角点可埋设木桩。为便于今后寻找,应当绘点之记。边角网的精度在很大程度上取决于图形结构(即点位间相互关系)。在确定了各控制点的位置后,还应进一步进行精度估算和优化设计,以确定具体观测哪些角度和边长。二、边角网测量的外业工作(一)选点埋桩
角度测量是边角测量的主要外业工作之一。在一个边角网点上,当观测方向为两个以上时,应采用全圆测回法进行观测。(二)角度观测nm:
边长主要用电磁波测距仪施测。(三)边长测量
只有一个已知点的坐标和一条边的坐标方位角作为起始数据,称为独立边角网;多于三个已知数据的往往称非独立边角网。本例中,A点为已知点,αab为已知方位角;必要的观测数据为3个,在此3个数据中,除了必须有一个边长外,其余二个不管是边长还是角度,都可解算B、C点的坐标。三、边角网的计算已知:XA,YA、αab求:XB,YB、XC,YC观测数据?BCAαabαγβs1s3s2
当观测数据多于必要的观测数据时,多余观测数称为多余观测,一个多余观测则产生一个条件方程式。本例中,观测了3个角度和3个边长,则多余观测数据为3个,因此产生3个条件方程式。条件方程式由于观测对象的不同也不尽相同。本例中的3个条件方程式,1个为图形条件:2个为正弦条件:用条件平差方法和最小二乘原理解算条件方程式,即可得到各观测量的平差值。式中:均为相应数据的平差值
§6.5交会定点一、前方交会APαβαABγB
二、极坐标法APαβαABγB
用全站仪进行坐标测量实际上是极坐标法定位,只不过是利用了全站仪的程序进行定位而已。工作步骤如下:1.安仪器于已知点A,量出仪高;待定点p安棱镜,量出镜高,并键于全站仪。2.键入已知点A的坐标和高程。3.瞄准B点,键入B点的方位角。4.瞄准P点,进行坐标测量。5.显示P点的坐标和高程。同时,将全部成果存入内存。三、用全站仪进行坐标测量
四、后方交会ABCPβ1β2
三角高程测量有时所求点的高程不可以立放水准尺,用什么方法解决呢?一般情况可以采用三角高程测量的方法求得。§6.6
ABDABihabvh0iα一、三角高程测量原理
当两点距离D>300m时,应考虑地球曲率和大气折光的影响。
二、两点距离D>300m时,考虑地球曲率和大气折光的影响地球曲率的影响:大气折光的影响:综合两项的影响:当D=300m,f≈5.9mm
三、考虑地球曲率和大气折光的影响高差计算公式为:当采用对向观测,即由A点观测B点,由B点观测A点,取对向观测所得高差绝对值的平均数可以抵消两差的影响,所以三角高程测量,一般采用对向观测,
四、三角高程测量的观测1、在测站安置仪器,量仪器高i和标杆高s(精确到0.5cm)2、用经纬仪观测竖直角α,必须以盘左、盘右进行观测。3、竖直角观测测回数与限差应符合规定。4、当两点间的距离未知时,可用三角测量方法计算得到。
五、三角高程测量的计算1.三角高程测量对向观测所求得的高差(经两差改正后)较差应小于0.1Dm(D为距离,单位:km),符合要求,则取平均值作为最后高差值。2.三角高程测量路线测应组成闭合或附合路线。观测结果列于图上,其线路高差闭合差的限值fh容=±0.05(D以公里km为单位)3.当观测成果满足要求时,则将闭合差按与边长成正比分配,再用改正后的高差计算各点的高程。