


- 1.55 MB
- 44页


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
第十六讲精密角度测量
第四章精密角度测量§4.1精密经纬仪---------一般了解§4.2角度观测误差分析----一般了解§4.3水平角观测------重点§4.4垂直角观测-------一般了解
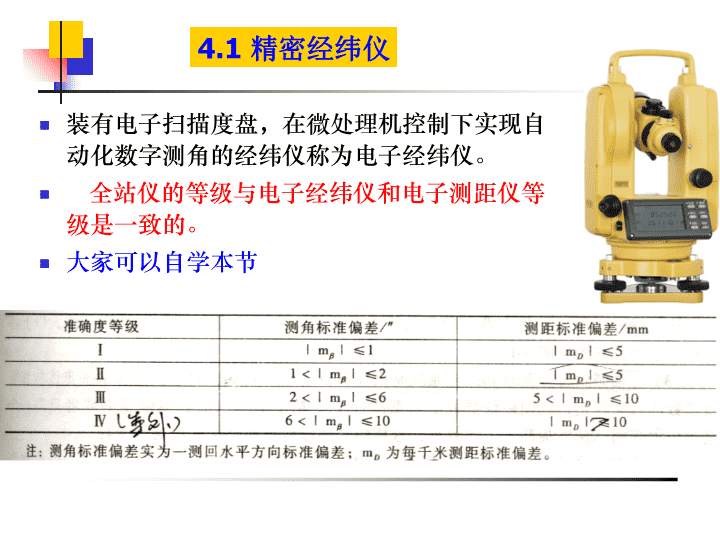
装有电子扫描度盘,在微处理机控制下实现自动化数字测角的经纬仪称为电子经纬仪。全站仪的等级与电子经纬仪和电子测距仪等级是一致的。大家可以自学本节4.1精密经纬仪
电子经纬仪日本DT-02l南方绝对编码型电子经纬仪DT-02
第一类,J2型经纬仪,是在度盘的全周上沿逆时针方向由0°到360°,且使90°到270°分划线的连线与望远镜视准轴平行。盘左时,视准线在垂直度盘上的读数永为90°;盘右时,永为270°。威特T2、蔡司010型经纬仪都属于这一类。
第二类,J07、J1型经纬仪不是从0°到360°,而是从55°到125°,对径刻划(即相差180°的刻划)注记相同。望远镜视准轴与对径读数均为90°的刻划线平行。即不论盘左或盘右,视准线在垂直度盘上的读数永为90°。垂直度盘读数
等级规定精密角度测量等级国家三角测量等级
等级规定测角中误差如何计算?测站平差法:先得到一测回方向观测中误差,再计算测角中误差。三角形闭合差法:由三角形闭合差根据中误差的定义公示计算得到。
等级规定思考题:请根据精密角度测量中测角中误差的规定,推算相应等级外业三角测量角度闭合差的限差值?
精密测角仪器精密角度测量可以使用的仪器有DJ05、DJ07、DJ1、DJ2型光学经纬仪或电子经纬仪。DJ05:KernE2、WildT2000系列(±0.5″)、TC(A)2003(±0.5″)DJ07:J07(±0.7″)、Opton厂的Elta2(±0.65″)DJ1:T3(±1″)、TCA1800(±1″,1mm+2ppm),TrimbleS8(±1″,1mm+1ppm)DJ2:T2、Topcon、Nikon→日渐普及,作为普通仪器
4.2角度观测误差分析4.2.1外界条件的影响1.大气层密度的变化和大气透明度对目标成像质量的影响1)大气层密度的变化对目标成像稳定性的影响目标成像是否稳定取决于大气层密度的变化,大气密度的变化程度取决于地面热辐射的强烈程度以及地形、地物和地类等的分布特征。2)大气透明度对目标成像清晰的影响目标成像是否清晰主要取决于大气的透明程度(尘埃和水蒸气)。地面的尘埃上升是由于风的作用(空气水平和上升对流)大量水蒸气也是水域和植被地段强烈升温产生的大气透明度从本质上说也主要决定于太阳辐射的强烈程度。有利观测时间:日出1h后的1-2h内,下午4-4h到日落前1h。
2.水平折光的影响光线经过连续折射后形成一条曲线,并向密度大的一方弯曲切线方向与这条曲线的微小的交角,称为微分折光微分折光的水平分量影响着视线的水平方向,对精密测角的观测成果产生系统性质的误差影响。4.2角度观测误差分析
水平折光的影响还随着大气温度的变化而不同白天在太阳照射下的沙石地面气温上升决,密度小,水面上方气温上升慢,密度大,白天和晚间的水平折光影响正好相反。取白天和晚间观测成果的平均值,可以有效地减弱水平折光的影响。河流山地4.2角度观测误差分析选点时,应避免使视线靠近山坡、大河或与湖泊的岸线平行,并应尽量避免视线通过高大建筑物、烟囱和电杆等实体的侧方。在造标时应使橹柱旁离视线至少10cm,一般在有微风的时候或在阴天进行观测,可以减弱部分水平折光的影响。
观测应在目标成像清晰、稳定的有利于观测的时间进行,以提高照准精度和减小旁折光的影响。观测前应认真调好焦距,消除视差。在一测回的观测过程中不得重新调焦,以免引起视准轴的变动。各测回的起始方向应均匀地分配在水平度盘和测微分划尺的不同位置上,以消除或减弱度盘分划线和测微分划尺的分划误差的影响。在上、下半测回之间倒转望远镜,以消除和减弱视准轴误差、水平轴倾斜误差等影响,同时可以由盘左、盘右读数之差求得两倍视准轴误差2C,借以检核观测质量。精密测角的一般原则4.2角度观测误差分析
上、下半测回照准目标的次序应相反,并使观测每一目标的操作时间大致相同,即在一测回的观测过程中,应按与时间对称排列的观测程序。为了克服或减弱在操作仪器的过程中带动水平度盘位移的误差,要求每半测回开始观测前,照准部按规定的转动方向先预转1~2周。使用照准部微动螺旋和测微螺旋时,其最后旋转方向均应为旋进。为了减弱垂直轴倾斜误差的影响,观测过程中应保持照准部水准器气泡居中。4.2角度观测误差分析
补充:精密角度测量特点1.影响水平角观测成果的主要误差来源是系统误差(环境因素、仪器条件等),其次才是偶然误差。采取措施:①克服水平折光的影响,选择有利的观测时间(如清晨是温度变化最小的时间段),并把观测工作分配在几个不同的时段内完成。②当边长相差很大不得不调焦时,应该对所使用的经纬仪调焦运行系统误差进行专门的检验与研究,对度盘及测微器的分划误差进行全面检验,以及光学对点误差,研究震动对测角的影响等。③减弱偶然误差的影响,在保证测回数的前提下,选择合适的测角仪器(研究和采用电子经纬仪),采用恰当的观测方法和小心谨慎的操作态度来提高观测的质量,而不是盲目地靠增加测回数。
补充:精密角度测量特点2.在短边情况下,特别要注意仪器和照准目标的对中,以及照准标志的选取。仪器对中误差对测角的影响,与目标点到仪器的距离有关,也与两目标点间的距离有关。目标偏心误差
精密角度测量特点计算:5米远处,±1mm目标对中误差所引起的水平角误差多大?
精密角度测量特点照准标志要有足够的颜色对比,图案简单并成对称分布。
4.4.1观测方法ABCDE方向观测法零方向盘左盘右方向观测法的测回数,是根据测角网的等级和所用仪器的类型确定的。§4.4水平角观测
除了观测方向数较少(国家规范规定不大于4)的测站以外,一般都要求每半测回观测闭合到起始方向以检查观测过程中水平度盘有无方位的变动。用T4光学经纬仪观测,如测微器两次接合读数之差符合限差规定,则取其和数作为的方向观测值。对于J2型仪器则取两次接合读数的平均数。在每半测回观测结束时,应立即计算归零差。当下半测回观测结束时,除应计算归零差、各方向的2c值、一测回中的方向观测值。对于零方向有闭合照准和起始照准两个方向值,一般取其平均值作为零方向在这一测回中的最后方向观测值。将其他方向的方向观测值减去零方向的方向观测值,就得到归零后各方向的方向观测值。在某些工程控制网中,同一测站上各水平方向的边长悬殊很大,若调焦透镜运行不正确,这时可以考虑改变观测程序:对一个目标调焦后接连进行正倒镜观测,然后对准下一个目标,重新调焦后立即进行正倒镜观测。§4.4水平角观测
§4.4方向观测法
DJ2度盘配置表
4.4.2测站限差的探讨(1)测站限差项目:两次重合读数差,半测回归零差,一测回2c互差,测回互差。§4.4水平角观测
②确定系统误差部份。常常根据大量作业的观测资料进行分析研究,从中找出在正常情况下各检验项可能包括的系统误差的大小。③计算差值的综合影响④最后根据“极限误差等于两倍中误差”求出差值的限差。(2)制定限差的基本步骤观测结果的差值是表示在一定的外界条件下观测误差的大小,其中包括偶然误差和系统误差两部份。制定限差允许值的步骤为:①确定偶然误差部份。观测结果的差值是每一个方向观测值的函数,因此列出差值函数式,就可按误差传播定律,由每一方向观测值中误差,计算出观测方向值函数(即差值)的中误差。§4.4水平角观测
(4)一方向观测值(偶然)中误差测定的两种方法:第一种室内实验可得到近似结果。可在室内求得,例如在度盘每隔5度的位置,旋进测微轮,使上下分划线重合二次,分别读取读数,然后由两次读数的差数求出重合一次的读数中误差。§4.4水平角观测
§4.4水平角观测
第二种从大量三角点的测站平差中求出各点的,然后取各点的带权平均值作为实际采用的目前采用§4.4水平角观测
(4)半测回归零差①偶然误差部份函数式②系统误差部份,主要仪器基座扭转等系统误差,大量实验表明一般为±2″规范规定§4.4水平角观测
(5)一测回内2C互差的限差①偶然误差部份②系统误差部份,主要包括视准轴误差,水平轴倾斜误差,基座位移以及外界因素引起的。§4.4水平角观测
视准轴部份横轴部份基座位移部份:2″规范规定可忽略不记§4.4水平角观测
(6)同一方向各测回间互差的限差①偶然误差部份②系统误差部份,主要包括水平度盘分划误差大约1~2秒;测微器分划误差很小;外界条件变化(旁折光),不好定。规范规定:§4.4水平角观测
4.4.4测站平差测站平差目的:求取各方向的测站平差值,计算一测回方向观测值的中误差和测站平差值的中误差。(1)各方向的测站平差值的求取取各测回归零方向的平均值,即得各方向的测站平差值。(2)一测回方向观测值的中误差和测站平差值的中误差的计算m为测回数,n为方向数,M为测站平差值的中误差§4.4水平角观测
§4.4方向观测法§4.4水平角观测
方向观测法
补充:精密角度测量技术要求1.水平角观测一般采用方向观测法,当方向数不多于三个时,可不归零;当采用测角的方法不能满足精度要求时,可采用精密测距的方法,通过边长值反算出相应的角度值。测角精度与测距精度的匹配问题:假设角所对应的边长为1km,测边的精度为±1mm,与这个精度相匹配的测角精度需要达到±0.2″,测角精度要达到这个值非常困难,此时可以测量全部边长建立控制网。
补充:精密角度测量技术要求2.当方向数超过6个时,可分组观测,每个测站上,把需要观测的n个方向,每两个方向组合成单角,然后对可能组合成的全部单角,以相同的测回数逐个的进行观测。实际工作中,为了使同一等级的三角网上经测站平差后的各个方向值的权P方都相等,要求各点上观测单角的测回数m,应根据它需要观测的方向数,按p方=n.m=常数的公式确定。
补充:精密角度测量技术要求3.方向观测法各项限差不应超过下表的规定:(单位:″)
补充:精密角度测量技术要求4.全组合测角法限差要求(单位:″):
补充:精密角度测量技术要求5.各等级测角控制网水平角观测技术要求应符合下表的规定:
补充:精密角度测量技术要求6.水平角观测成果的重测与取舍(参见实验1的文字材料)
本章结束!