


- 9.68 MB
- 59页
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
测量学第5章距离测量与直线定向7/27/20211合肥工业大学土建学院测量工程系
第5章距离测量与直线定向距离测量是测量三项基本工作之一.距离测量的方法主要有:1.钢尺(皮尺)量距.2.视距测量3.光电测距要确定地面点的平面位置,还必须测定直线的方向,即直线定向7/27/20212合肥工业大学土建学院测量工程系
视距测量图7/27/20213合肥工业大学土建学院测量工程系
利用调制波波长测距B测距仪反光棱镜S电磁波测距电磁波测距图A7/27/20214合肥工业大学土建学院测量工程系
第5章距离测量与直线定向§5.1钢尺量距§5.2视距测量§5.3红外线测距仪及全站仪§5.4直线定向7/27/20215合肥工业大学土建学院测量工程系
§5.1钢尺量距1.钢卷尺尺长与规格:20米、30米、50米,钢质,涂塑或不涂塑。刻度与注记:毫米刻度,注记厘米、分米、米。零分划位置有不同,分刻线尺和端点尺两种。5.1.1量距用的工具:钢卷尺,花杆,测钎一般量距方法量距相对精度1200015000精密量距方法量距相对精度1100001400002.花杆定线用(量距时标定直线量距的前进方向)3.测钎量距时在地面标定尺段端点位置。7/27/20216合肥工业大学土建学院测量工程系
端点尺刻线尺测钎花杆皮尺测绳钢卷尺7/27/20217合肥工业大学土建学院测量工程系
5.1.2直线定线1.两点间目估定线2.两点间互不通视定线3.经纬仪定线:如果量距要求的精度较高,可在其端点A安置经纬仪定线.7/27/20218合肥工业大学土建学院测量工程系
5.1.3丈量方法(往返丈量))距离用下式计算:D=nl+Δl式中:l——整尺段的长度;n——丈量的整尺段数;l——零尺段长度。往返丈量较差D=D往-D返距离平均值D平=(D往-D返)相对误差K=1.在平坦地面丈量7/27/20219合肥工业大学土建学院测量工程系
2.倾斜地面丈量SDh(1)斜量法:地面坡度均匀,将量得的倾斜距离S归算成水平距离D。高差h用水准仪测定。或水平距离:(2)在倾斜地面平量7/27/202110合肥工业大学土建学院测量工程系
量距相对精度可达11万14万。3.钢尺量距的精密方法精密量距时采取的措施:1.用检定过的钢尺;2.经纬仪定线;3.钉尺段桩(概量得),用水准仪测量桩间高差;4.对钢尺施加固定拉力,并测量温度;5.对量距结果加三项改正数。7/27/202111合肥工业大学土建学院测量工程系
三项改正数5.1.4钢尺量距的成果整理每尺段经改正后的水平距离:总的水平距离:7/27/202112合肥工业大学土建学院测量工程系
5.1.5钢尺检定目的:求得钢尺两端点刻划间的实际长度。方法:用钢尺对一段精确的标准长度进行丈量,从而求得钢尺的尺长改正数。该检定场地也称为“比尺场”。。。。。L比尺场示意图作法:“比尺场”为理想的砼条形场地,埋有尺段标志。将待检定的钢尺,用精密量距的方法,对该标准距离L进行丈量。通过对量距结果的整理,得出该钢尺的尺长方程式。0——钢尺名义长(m);t0——标准温度,一般取20℃;d——尺长改正值(mm);t——丈量时温度(℃)——钢的膨胀系数,1.2×10-5/℃;1.尺长方程式:=0+d+(t-t0)×07/27/202113合肥工业大学土建学院测量工程系
例:用一检定过的30米钢尺沿倾斜地面丈量AB距离,数据见下表。该钢尺的尺长方程式如下,请整理量距成果。(注:钢尺膨胀系数=0.0000115~0.0000125为钢尺温度变化1度时,单位长度的变化量。)尺段长度及量距精度计算7/27/202114合肥工业大学土建学院测量工程系
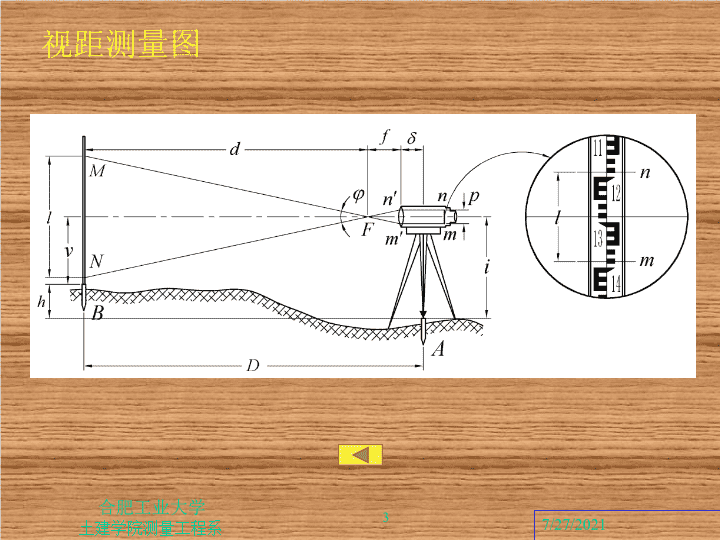
§5.2视距测量5.2.1视距测量概述视距测量是一种间接测距方法;它利用望远镜内十字丝分划板上的视距丝及刻有厘米分划的视距标尺(地形塔尺或普通水准尺),根据光学原理可以同时测定两点间的水平距离和高差.其中测量距离的相对误差约为1/300,低于钢尺量距;测定高差的精度低于水准测量;视距测量广泛用于地形测量的碎部测量中。7/27/202115合肥工业大学土建学院测量工程系
5.2.2视准轴水平时的视距计算公式AB为待测距离,在A点安置经纬仪,B点竖立视距尺,设望远镜视线水平,瞄准B点的视距尺,此时视线与视距尺垂直。7/27/202116合肥工业大学土建学院测量工程系
视线水平时的视距测量公式:(1)水平距离公式:(2)高差公式:(3)B点高程:7/27/202117合肥工业大学土建学院测量工程系
5.2.3视线倾斜时的视距测量公式(1)水平距离公式:(2)初算高差:(3)高差公式:7/27/202118合肥工业大学土建学院测量工程系
(1)在测站A安置经纬仪,量取仪器高i,在测点B竖立视距尺;(2)照准视距尺,用上下视距丝分别在尺上读取读数,算出视距间隔n(n=下丝读数-上丝读数)。也可先将中丝对准仪器高读竖直角,然后把上丝对准邻近整数刻划后直接读取视距间隔;5.2.4视距测量观测与计算方法7/27/202119合肥工业大学土建学院测量工程系
(3)转动竖盘指标水准管微动螺旋使竖盘指标水准管气泡居中,读取竖盘读数,算出竖直角。对有竖盘指标自动归零装置的仪器,应打开自动归零装置后再读数;5.2.4视距测量观测与计算方法(4)根据视距公式,计算水平距离和高差及立尺点的高程。7/27/202120合肥工业大学土建学院测量工程系
一、概述电磁波测距(Electro-magneticDistanceMeasuring,EDM)是用电磁波(光波或微波)作为载波,传输测距信号,以测量两点间距离的一种方法。EDM具有测程长、精度高、作业快、工作强度低、几乎不受地形限制等优点。1948年,瑞典AGA(阿嘎)公司(现更名为Geotronics捷创力公司)研制成功了世界上第一台电磁波测距仪,它采用白炽灯发射的光波作载波,应用了大量的电子管元件,仪器相当笨重且功耗大。为避开白天太阳光对测距信号的干扰,只能在夜间作业,测距操作和计算都比较复杂。§5.3电磁波测距及全站仪7/27/202121合肥工业大学土建学院测量工程系
1960年世界上成功研制出了第一台红宝石激光器和第一台氦-氖激光器,1962年砷化镓半导体激光器研制成功。与白炽灯比较,激光的优点是发散角小、穿透力强、传输的距离远、不受太阳光干扰、基本上可以全天侯作业。1967年AGA公司推出了世界上第一台商品化的激光测距仪AGA-8。该仪器采用5mw的氦-氖激光器作发光元件,白天测程为40km,夜间测程达60km,测距精度(5mm+1ppm),主机重量23kg。我国的武汉地震大队也于1969年研制成功了JCY-1型激光测距仪,1974年又研制并生产了JCY-2型激光测距仪。该仪器采用2.5mw的氦-氖激光器作发光元件,白天测程为20km,测距精度(5mm+1ppm),主机重量16.3kg。7/27/202122合肥工业大学土建学院测量工程系
随着半导体技术的发展,从60年代末70年代初起,采用砷化镓发光二极管作发光元件的红外测距仪逐渐在世界上流行起来。与激光测距仪比较,红外测距仪有体积小、重量轻、功耗小、测距快、自动化程度高等优点。由于红外光的发散角比激光大,所以红外测距仪的测程一般小于15km。现在的红外测距仪已经和电子经纬仪及计算机软硬件制造在一起,形成了全站仪,并向着自动化、智能化和利用蓝牙技术实现测量数据的无线传输方向飞速发展。7/27/202123合肥工业大学土建学院测量工程系
二、电磁波测距仪分类1.按其所采用的载波(光源)可分为:①微波测距仪(microwaveEDMinstrument);②激光测距仪(laserEDMinstrument);③红外测距仪(infraredEDMinstrument);2.按测程分为:①短程测距仪(≤5km)②中程测距仪(5~15km)③远程测距仪(≥15km)3.按精度分为:①Ⅰ级测距仪(mD≤5mm)②Ⅱ级测距仪(5≤mD≤10mm)③Ⅲ级测距仪(mD≥10mm)4.按测距原理分为:①脉冲式;②相位式7/27/202124合肥工业大学土建学院测量工程系
5.3.1红外测距的测距原理基本公式:c0—光在真空中的速度ng—光在大气中传输的折射率Δt—光波在AB间往返传输时间7/27/202125合肥工业大学土建学院测量工程系
直接测时---该类测距仪称为脉冲式测距仪,该仪器因其精度较低,通常只用于精度较低的远距离测量、地形测量和炮瞄雷达测距。间接测时----用测定相位的方法来测定距离,此类仪器称为相位式测距仪。现有的精密光电测距仪都不采用直接测时的方法,而采用间接测时。电磁波测距方式7/27/202126合肥工业大学土建学院测量工程系
脉冲式测距原理假设时钟脉冲的震荡频率为,震荡周期为计数器记录的震荡次数为N,则脉冲光波在AB两点间往返的时间为:7/27/202127合肥工业大学土建学院测量工程系
2.相位式测距原理用测定相位的方法来测定距离,此类仪器称为相位式测距仪。它是用一种连续波(精密光波测距仪采用光波)作为“运输工具”(称为载波),通过一个调制器使载波的振幅或频率按照调制波的变化做周期性变化。测距时,通过测量调制波在待测距离上往返传播所产生的相位变化,间接地确定传播时间t,进而求得待测距离D。7/27/202128合肥工业大学土建学院测量工程系
相位式测距原理调制波的调制频率f,角频率,周期T,波长:设调制波在距离D往返一次产生的相位变化为,调制信号一个周期相位变化为2π,则调制波的传播时间t为:代入基本公式得:7/27/202129合肥工业大学土建学院测量工程系
相位式测距原理设调制信号为正弦信号,包含2π的整倍数N2π,和不足2π的尾数部分ψ,即:代入前面公式:7/27/202130合肥工业大学土建学院测量工程系
相位式测距原理令:--单位长,“光测尺”,“电子尺”公式改写成:上式就是相位式测距原理公式。相位式测距仪是用长度为LS的“测尺”去量测距离,量了N个整尺段加上不足一个LS的长度就是所测距离。采用多个“测尺”组合实现测距技术过程。设计;精测尺+粗测尺测距。7/27/202131合肥工业大学土建学院测量工程系
相位式测距原理调制频率与测尺长度的关系调制频率f15MHz7.5MHz1.5MHz150kHz75kHz15kHz测尺长度λ/210m20m100m1km2km10km精度1cm2cm10cm1m2m10m7/27/202132合肥工业大学土建学院测量工程系
5.3.2光电测距仪的组成7/27/202133合肥工业大学土建学院测量工程系
5.3.2光电测距仪的组成7/27/202134合肥工业大学土建学院测量工程系
5.3.4全站仪及其使用(一)全站仪概述(二)全站仪的功能(三)几种全站仪及其基本应用7/27/202135合肥工业大学土建学院测量工程系
南方NTS全站仪TOPCONGTS全站仪7/27/202136合肥工业大学土建学院测量工程系
Leica全站仪7/27/202137合肥工业大学土建学院测量工程系
(一)全站仪概述全站仪(totalstation)是由电子测角、光电测距、微型机及其软件组合而成的智能型光电测量仪器。全站仪的基本功能是测量水平角、竖直角和距离。全站仪具有如下特点:同时进行角度测量(水平角、竖直角)和距离测量(斜距S、平距D、高差h);测距系统光轴与测角系统视准轴同轴(三轴同一);显示测点的角度(方向值)、距离、高差或三维坐标;拥有后方交会、放样、偏心测量、悬高测量、对边测量、面积计算等高级测量功能。7/27/202138合肥工业大学土建学院测量工程系
全站仪特点拥有较大容量的内部存储器,以数据文件形式存储已知点和观测点的点号、编码、三维坐标;实现全站仪与计算机的数据通讯;高精度全站仪测角达0.5秒级,测距精度达(0.1mm+0.1PPM);与计算机联合组成的智能观测系统能实现全自动瞄准、观测、记录、存储和数据的传输,被称为测量机器人。7/27/202139合肥工业大学土建学院测量工程系
三轴同一望远镜在全站仪的望远镜中,照准目标的视准轴、光电测距的红外光发射光轴和接收光轴是同轴的,其光路如图所示。因此,测量时使望远镜照准目标棱镜的中心,就能同时测定水平角、垂直角和斜距7/27/202140合肥工业大学土建学院测量工程系
测量仪器总的发展过程测量仪器总的发展过程:光学经纬仪电子经纬仪速测全站仪全站仪。全站仪的发展过程:1.普通型全站仪2.功能型全站仪3.磁卡型全站仪4.内存式全站仪5.全自动智能全站仪全站仪生产厂家:瑞士:徕卡Leica德国:蔡司Zeiss日本:拓普康TOPCON,索佳SOKKIA,宾得,尼康
中国:南方、苏州、北京7/27/202141合肥工业大学土建学院测量工程系
(二)全站仪的功能对边测量、悬高测量、后方交会、放样、偏心测量、面积计算等高级测量功能。7/27/202142合肥工业大学土建学院测量工程系
全站仪的功能1、对边测量如图,分别瞄准两个目标点处的棱镜并观测后,仪器即可显示出两个棱镜之间的平距(HD)、斜距(S)、高差(V)和坡度(%)。对边测量可以连续进行。VSHD%7/27/202143合肥工业大学土建学院测量工程系
全站仪的功能2、悬高测量如图,要测量某些不能设置反射棱镜的目标(高压电线、桥梁桁架)的高度时,可在目标正上方或正下方处安置棱镜,输入棱镜高h1,瞄准棱镜并观测后,再瞄准目标,仪器即可显示目标的高度HHh1h27/27/202144合肥工业大学土建学院测量工程系
全站仪的功能3、后方交会测量如图,全站仪安置在某一待定点上,通过对两个以上的已知点处的棱镜进行观测,并输入各已知点三维坐标及仪器高和棱镜高后,全站仪即可显示待定点的三维坐标。7/27/202145合肥工业大学土建学院测量工程系
4、三维坐标测量如图,将全站仪安置在已知点A,棱镜设置在待定点P,输入A点已知坐标及仪器高和棱镜高后,先后视已知点B并输入B点坐标(后视已知点是为了设置方向位角)然后瞄准P点处棱镜并进行观测,仪器即可显示待定P的三维坐标。APB全站仪的功能7/27/202146合肥工业大学土建学院测量工程系
全站仪的功能5、放样测量将要测设的角度和边长(或坐标值)输入全站仪,在放样过程中仪器显示角度和边长的实测值与放样值之差,根据显示的偏离值及符号调整棱镜位置,直至偏离值为零,此时棱镜所处位置即为要测设的点位。有的电子全站仪还可通过图形显示出棱镜上下左右前后的移动方向。7/27/202147合肥工业大学土建学院测量工程系
全站仪的功能6、偏心测量如图,若侍定点处不能设置棱镜,可将棱镜设置在待定点的左侧或右侧,并使棱镜至站点的距离相当,瞄准棱镜并进行观测,再照准待定点,仪器即可显示待定点的坐标。不同厂家生产的电子全站仪其键盘设计并不完全相同,实现相同测量功能的按键程序和步骤也不完全一样,具体使用应参见厂家的使用说明书。7/27/202148合肥工业大学土建学院测量工程系
全站仪测量的流程野外采集数据:南方NTS、TOPCON全站仪+PDA(测图精灵)传输数据:将数据文件传入计算机处理数据:用测图软件(南方测绘CASS)处理、编辑输出成果:数字化地形图、电子地图(.dwg)、工程图。7/27/202149合肥工业大学土建学院测量工程系
§5.4直线定向5.4.1直线定向的概念确定地面上两点之间的相对位置,仅知道两点之间的水平距离是不够的,还必须确定此直线与标准方向之间的水平夹角。确定直线与标准方向之间的水平角度称为直线定向。7/27/202150合肥工业大学土建学院测量工程系
标准方向的种类1.真子午线方向通过地球表面某点真子午线的切线方向,称为该点的真子午线方向,真子午线方向是用天文测量方法或用陀螺经纬仪测定的。2.磁于午线方向磁子午线方向是磁针在地球磁场的作用下,磁针自由静止时其轴线所指的方向。磁子午线方向可用罗盘仪测定。7/27/202151合肥工业大学土建学院测量工程系
标准方向的种类3.坐标纵轴方向(中央子午线方向)第二章已述及,我国采用高斯平面直角坐标系,每一6°带或3°带内都以该带的中央子午线为坐标纵轴方向。因此,该带内直线定向,就用该带的坐标纵轴方向作为标准方向。如假定坐标系,则用假定的坐标纵轴(X轴)作为标准方向。7/27/202152合肥工业大学土建学院测量工程系
5.4.2表示直线方向的方法测量工作中,常采用方位角来表示直线的方向。由标准方向的北端起,顺时针方向量到某直线的夹角,称为该直线的方位角,其角值从0°~360°。由不同的标准方向所得到的方位角,分别为:真方位角:A磁方位角:Am坐标方位角:α标准方向OP7/27/202153合肥工业大学土建学院测量工程系
几种方位角之间的关系1.真方位角与磁方位角之间的关系由于地磁南北极与地球的南北极并不重合,因此,过地面上某点的真子午线方向与磁子午线方向常不重合,两者之间的夹角称为磁偏角δ,磁针北端偏于其子午线以东称东偏,偏于其子午线以西称西偏。δ东偏取正值,西偏取负值。我国磁偏角的变化大约在+6°到-10°之间。直线的真方位角与磁方位7/27/202154合肥工业大学土建学院测量工程系
几种方位角之间的关系2.真方位角与坐标方位角之间的关系中央子午线在高斯平面上是一条直线,作为该带的坐标纵轴,而其它子午线投影后为收敛于两极的曲线,地面点M、N等点的真子午线方向与中央子午线之间的夹角,称为子午线收敛角γ。在中央子午线以东地区,各点的坐标纵轴偏在真子午线的东边,γ为正值;在中央子午线以西地区,γ为负值。直线的真方位角与磁方位角之间可用下式进行换算7/27/202155合肥工业大学土建学院测量工程系
几种方位角之间的关系3.坐标方位角与磁方位角的关系若已知某点的磁偏角δ与子午线收敛角γ,则坐标方位角与磁方位角之间的换算式为—为磁坐偏角7/27/202156合肥工业大学土建学院测量工程系
当标准方向为坐标纵轴(中央子午线)方向时,直线的方位角称为坐标方位角(,简称方向角)。XYABAB例1:已知CD=782024,JK=3261230,求DC,KJ:各点的坐标纵轴方向都是平行的,所以,一条直线有两个相差180的方位角,互称为正、反方位角。正、反方位角关系BAABBA=AB180解:DC=2582024KJ=14612305.4.3正、反坐标方位角及其推算7/27/202157合肥工业大学土建学院测量工程系
方位角的推算左角公式:右角公式:方位角的范围:当时,应减去7/27/202158合肥工业大学土建学院测量工程系
2312B1已知:AB=7620,B=18542,1=21108,2=15045求:B1、12、2312ABAB12B解:B1=BA+B=AB+180+B=7620+180+18542=820212=1B+1=B1+180+1=8202+180+21108=1131023=21+2=12+180+2=11310+180+15045=8355方位角推算公式:方位角的推算7/27/202159合肥工业大学土建学院测量工程系